Курсовая на тему Математические модели в расчетах на ЭВМ
Работа добавлена на сайт bukvasha.net: 2014-11-29Поможем написать учебную работу
Если у вас возникли сложности с курсовой, контрольной, дипломной, рефератом, отчетом по практике, научно-исследовательской и любой другой работой - мы готовы помочь.

Предоплата всего
от 25%

Подписываем
договор
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ДОНБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра АУТПТЭК
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе
по дисциплине:
«Математические модели в расчетах на ЭВМ»
Выполнил:
студент гр.АКГ-05
Коновалов А.А.
Проверил:
ст.преп. Склярова Г.А
асс. Марусей О.В.
Алчевск 2007
РЕФЕРАТ
Данная курсовая работа содержит 30 страниц, 16 рисунков, 2 таблицы, 3 источника литературы.
Целью данной курсовой работы является построение АЧХ, КЧХ, ФЧХ (моделирование в частотной области) и переходный процесс (моделирование во временной области).
В результате выполненной курсовой работы были получены ФЧХ, КЧХ, ФЧХ и переходный процесс.
СТРУКТУРНАЯ СХЕМА, ПЕРЕДАТОЧНАЯ ФУНКЦИЯ, МАТЕМАТИЧЕСКАЯ МОДЕЛЬ, ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ, КРИВАЯ ПЕРЕХОДНОГО ПРОЦЕССА.
СОДЕРЖАНИЕ
Введение
1. Моделирование в частотной области
2. Моделирование во временной области
Заключение
Перечень ссылок
ВВЕДЕНИЕ
Часто при решении задач автоматизации приходится прибегать к моделированию. Это связанно с тем, что большинство технологических объектов являются сложными и исследовать реакцию этих объектов на те или иные объекты является достаточно дорогой операцией.
Различают три основных вида модели:
— алгоритмическая
— физическая
— математическая
Алгоритмическая модель - это некоторая последовательность действий и операций.
Физическая модель - это точная копия технологического объекта в увеличенном или уменьшенном масштабе.
Математическая модель может быть представлена в виде алгебраических или систем алгебраических, дифференциальных или систем дифференциальных уравнений.
В виду удобства работы наибольшее распространение при исследовании получили математические модели.
В данной работе произведем моделирование соединения звеньев в частотной области.
1 МОДЕЛИРОВАНИЕ В ЧАСТОТНОЙ ОБЛАСТИ
Все технологические объекты являются достаточно сложными объектами и они описываются дифференциальными уравнениями высоких порядков или системой дифференциальных уравнений. Для исследования объекта в частотной области достаточно построить соответствующие частотные характеристики:
- амплитудно-частотная характеристика показывает зависимость амплитуды сигнала на выходе объекта от частоты сигнала на его входе при неизменной амплитуде входного сигнала;
- фазочастотная характеристика показывает на сколько (на какой угол) выходной сигнал опережает или отстает от входного сигнала при изменении частоты входного сигнала от 0 до ∞;
- комплексная частотная характеристика или амплитудно-фазная характеристика показывает, как изменяется в комплексной плоскости модуль и фаза исследуемого объекта при изменении частоты от 0 до ∞.
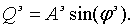
Проводим моделирование в частотной области соединения звеньев представленных в задании на рисунке 1.1
При известных передаточных функциях:
Введем формулы для вычисления частотных функций, амплитуды и фазы данных звеньев:














Выполним преобразования структурной схемы. При преобразовании структурных звеньев необходимо будет находить значения передаточной 
и частотой 
(производим замену p=jω) функций, общей вещественной 
и общей мнимой 
составляющих, модуля 
и фазы 
полученных звеньев.
Для параллельного соединения эти значения рассчитываются по формулам (1.1)-(1.6):
(1.1)
где 
- передаточная функция i-того звена.
(1.2)
где (jω) - частотная функция i-того звена.

(1.3)
где 
- вещественная составляющая i-того звена.

(1.4)
где 
- мнимая составляющая i-того звена.

(1.5)
. (1.6)
При последовательном соединении значения будут рассчитываться по формулам (1.7)-(1.12):
(1.7)
где - передаточная функция i-того звена.
(1.8)
где (jω) - частотная функция i-того звена.

(1.9)
 где
где 
- модуль i- того звена.
(1.10)
где - фаза i- того звена.
(1.11)
(1.12)
Выполним эквивалентные преобразования заданных соединений элементов. Заменим параллельное соединение звеньев 
, 
одним эквивалентным звеном (рисунок 1.2).
SHAPE \* MERGEFORMAT
Рисунок 1.2 – Структурные преобразования
При параллельном соединении звеньев передаточная и частотная функции находятся по формулам (1.1)-(1.2):



Общая вещественная составляющая и общая мнимая составляющая определяются соответственно как сумма вещественных и сумма мнимых составляющих отдельных звеньев по формулам (1.3)-(1.4):

При параллельном соединении удобнее работать с вещественными и мнимыми составляющими. Если требуется вычислить модуль и фазу такого соединения, то результирующие модуль и фаза определяются по формулам
(1.5)-(1.6):

Заменим параллельное соединение звеньев 
одним эквивалентным звеном (рисунок 1.3).
SHAPE \* MERGEFORMAT
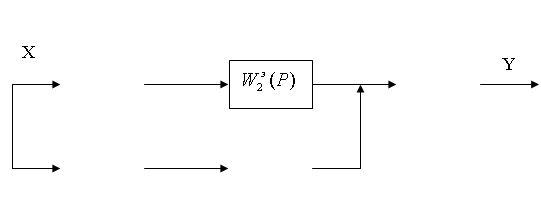
Рисунок 1.3 – Структурные преобразования
При параллельном соединении звеньев передаточная и частотная функции находятся по формулам (1.1)-(1.2):



Общая вещественная составляющая и общая мнимая составляющая определяются соответственно как сумма вещественных и сумма мнимых составляющих отдельных звеньев по формулам (1.3)-(1.4):


При параллельном соединении удобнее работать с вещественными и мнимыми составляющими. Если требуется вычислить модуль и фазу такого соединения, то результирующие модуль и фаза определяются по формулам (1.5)-(1.6):
Заменим последовательное соединение звеньев 
, 
одним
эквивалентным звеном (рисунок 1.4).
X Y
Рисунок 1.4 - Структурные преобразования
При последовательном соединении удобнее работать с модулями и фазами звеньев. Определим их по формулам (1.9)-(1.10):
По формулам (1.11)-(1.12) определим общую вещественную и общую мнимую составляющие:


Заменим последовательное соединение звеньев 
, 
одним эквивалентным звеном (рисунок 1.5).
X Y
Рисунок 1.5 - Структурные преобразования
При последовательном соединении удобнее работать с модулями и фазами звеньев. Определим их по формулам (1.9)-(1.10):
По формулам (1.11)-(1.12) определим общую вещественную и общую мнимую составляющие:


Заменим параллельное соединение звеньев 
, 
одним эквивалентным звеном (рисунок 1.6).



X Y
Рисунок 1.6 - Структурные преобразования
При параллельном соединении звеньев передаточная и частотная функции находятся по формулам (1.1)-(1.2):



Общая вещественная составляющая и общая мнимая составляющая определяются соответственно как сумма вещественных и сумма мнимых составляющих отдельных звеньев по формулам (1.3)-(1.4):


При параллельном соединении удобнее работать с вещественными и мнимыми составляющими. Если требуется вычислить модуль и фазу такого соединения, то результирующие модуль и фаза определяются по формулам (1.5)-(1.6):
Заменим последовательное соединение звеньев 
, 
одним эквивалентным звеном (рисунок 1.7).
X Y
Рисунок 1.7 - Структурные преобразования
При последовательном соединении удобнее работать с модулями и фазами звеньев. Определим их по формулам (1.9)-(1.10):
По формулам (1.11)-(1.12) определим общую вещественную и общую мнимую составляющие:


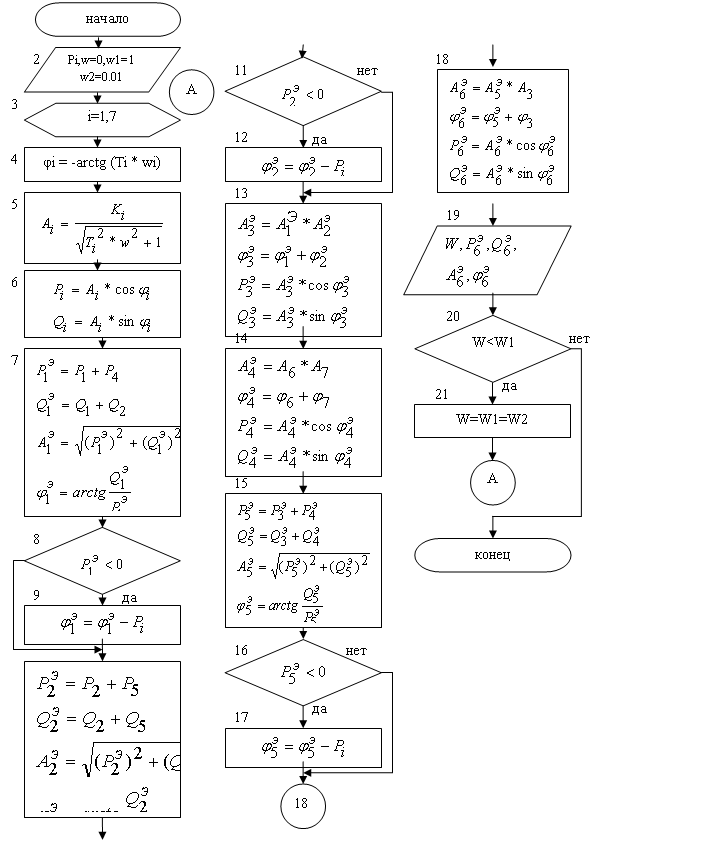
Блок-схема алгоритма представлена на рисунке 1.8

SHAPE \* MERGEFORMAT
Текст разработанной программы приведён на рисунке 1.9.
При разработке были введены следующие идентификаторы:
W- начальное значение диапазона изменения частоты, а также для хранения текущего значения частоты;
W1- конечное значение частоты;
W2- шаг изменения частоты.
Для ввода значений параметров звеньев 
и 
используются массивы К(7) и Т(7). Ввод значений этих параметров осуществляется с помощью операторов DATA READ. Вычисленные значения выходных переменных сохраняются в файле mm_8 txt на диске А.
OPEN "A:\mm_8.txt" FOR OUTPUT AS #2
CLS : Pi = 3.141592654#: W = 0: W1 = 1: W2 = .05
DIM K(7), T(7)
DATA 1,10,2,15,1,20,2,5,4,10,3,12,1,8
FOR i = 1 TO 7
READ K(i), T(i)
PRINT USING "K(#)=#, T(#)=##"; i; K(i); i; T(i)
NEXT i
10 FOR i = 1 TO 7
A(i) = K(i) / SQR(T(i) ^ 2 * W ^ 2 + 1)
F(i) = -ATN(T(i) * W)
P(i) = A(i) * COS(F(i))
Q(i) = A(i) * SIN(F(i))
NEXT i
REM ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ
Pe(1) = P(1) + P(4)
Qe(1) = Q(1) + Q(4)
Ae(1) = SQR(Pe(1) ^ 2 + Qe(1) ^ 2)
Fe(1) = ATN(Qe(1) / Pe(1))
IF Pe(1) < 0 THEN Fe(1) = Fe(1) – Pi
REM ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ
Pe(2) = P(2) + P(5)
Qe(2) = Q(2) + Q(5)
Ae(2) = SQR(Pe(2) ^ 2 + Qe(2) ^ 2)
Fe(2) = ATN(Qe(2) / Pe(2))
Рисунок 1.9, лист1- Листинг программы.
IF Pe(2) < 0 THEN Fe(2) = Fe(2) – Pi
REM ПОСЛЕДОВАТЕЛЬНОЕ СОЕДИНЕНИЕ
ДОНБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра АУТПТЭК
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе
по дисциплине:
«Математические модели в расчетах на ЭВМ»
Выполнил:
студент гр.АКГ-05
Коновалов А.А.
Проверил:
ст.преп. Склярова Г.А
асс. Марусей О.В.
Алчевск 2007
РЕФЕРАТ
Данная курсовая работа содержит 30 страниц, 16 рисунков, 2 таблицы, 3 источника литературы.
Целью данной курсовой работы является построение АЧХ, КЧХ, ФЧХ (моделирование в частотной области) и переходный процесс (моделирование во временной области).
В результате выполненной курсовой работы были получены ФЧХ, КЧХ, ФЧХ и переходный процесс.
СТРУКТУРНАЯ СХЕМА, ПЕРЕДАТОЧНАЯ ФУНКЦИЯ, МАТЕМАТИЧЕСКАЯ МОДЕЛЬ, ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ, КРИВАЯ ПЕРЕХОДНОГО ПРОЦЕССА.
СОДЕРЖАНИЕ
Введение
1. Моделирование в частотной области
2. Моделирование во временной области
Заключение
Перечень ссылок
ВВЕДЕНИЕ
Часто при решении задач автоматизации приходится прибегать к моделированию. Это связанно с тем, что большинство технологических объектов являются сложными и исследовать реакцию этих объектов на те или иные объекты является достаточно дорогой операцией.
Различают три основных вида модели:
— алгоритмическая
— физическая
— математическая
Алгоритмическая модель - это некоторая последовательность действий и операций.
Физическая модель - это точная копия технологического объекта в увеличенном или уменьшенном масштабе.
Математическая модель может быть представлена в виде алгебраических или систем алгебраических, дифференциальных или систем дифференциальных уравнений.
В виду удобства работы наибольшее распространение при исследовании получили математические модели.
В данной работе произведем моделирование соединения звеньев в частотной области.
1 МОДЕЛИРОВАНИЕ В ЧАСТОТНОЙ ОБЛАСТИ
Все технологические объекты являются достаточно сложными объектами и они описываются дифференциальными уравнениями высоких порядков или системой дифференциальных уравнений. Для исследования объекта в частотной области достаточно построить соответствующие частотные характеристики:
- амплитудно-частотная характеристика показывает зависимость амплитуды сигнала на выходе объекта от частоты сигнала на его входе при неизменной амплитуде входного сигнала;
- фазочастотная характеристика показывает на сколько (на какой угол) выходной сигнал опережает или отстает от входного сигнала при изменении частоты входного сигнала от 0 до ∞;
- комплексная частотная характеристика или амплитудно-фазная характеристика показывает, как изменяется в комплексной плоскости модуль и фаза исследуемого объекта при изменении частоты от 0 до ∞.
Проводим моделирование в частотной области соединения звеньев представленных в задании на рисунке 1.1
При известных передаточных функциях:
Введем формулы для вычисления частотных функций, амплитуды и фазы данных звеньев:
Выполним преобразования структурной схемы. При преобразовании структурных звеньев необходимо будет находить значения передаточной
Для параллельного соединения эти значения рассчитываются по формулам (1.1)-(1.6):
где
где
где
где
При последовательном соединении значения будут рассчитываться по формулам (1.7)-(1.12):
где
где
(1.10)
где
Выполним эквивалентные преобразования заданных соединений элементов. Заменим параллельное соединение звеньев
|
| W5(P) |
| W7(P) |
| W6(P) |
| |
| W3(P) |
| W2(P) |
| X |
Рисунок 1.2 – Структурные преобразования
При параллельном соединении звеньев передаточная и частотная функции находятся по формулам (1.1)-(1.2):
Общая вещественная составляющая и общая мнимая составляющая определяются соответственно как сумма вещественных и сумма мнимых составляющих отдельных звеньев по формулам (1.3)-(1.4):
При параллельном соединении удобнее работать с вещественными и мнимыми составляющими. Если требуется вычислить модуль и фазу такого соединения, то результирующие модуль и фаза определяются по формулам
(1.5)-(1.6):
Заменим параллельное соединение звеньев
|
|
|
|
| |
| X |
| Y |
Рисунок 1.3 – Структурные преобразования
При параллельном соединении звеньев передаточная и частотная функции находятся по формулам (1.1)-(1.2):
Общая вещественная составляющая и общая мнимая составляющая определяются соответственно как сумма вещественных и сумма мнимых составляющих отдельных звеньев по формулам (1.3)-(1.4):
При параллельном соединении удобнее работать с вещественными и мнимыми составляющими. Если требуется вычислить модуль и фазу такого соединения, то результирующие модуль и фаза определяются по формулам (1.5)-(1.6):
Заменим последовательное соединение звеньев
эквивалентным звеном (рисунок 1.4).
|
|
| W6(P) |
| W7(P) |
 | |||
Рисунок 1.4 - Структурные преобразования
При последовательном соединении удобнее работать с модулями и фазами звеньев. Определим их по формулам (1.9)-(1.10):
По формулам (1.11)-(1.12) определим общую вещественную и общую мнимую составляющие:
Заменим последовательное соединение звеньев
| W |
 | |||
|
|
Рисунок 1.5 - Структурные преобразования
При последовательном соединении удобнее работать с модулями и фазами звеньев. Определим их по формулам (1.9)-(1.10):
По формулам (1.11)-(1.12) определим общую вещественную и общую мнимую составляющие:
Заменим параллельное соединение звеньев
|
|
Рисунок 1.6 - Структурные преобразования
При параллельном соединении звеньев передаточная и частотная функции находятся по формулам (1.1)-(1.2):
Общая вещественная составляющая и общая мнимая составляющая определяются соответственно как сумма вещественных и сумма мнимых составляющих отдельных звеньев по формулам (1.3)-(1.4):
При параллельном соединении удобнее работать с вещественными и мнимыми составляющими. Если требуется вычислить модуль и фазу такого соединения, то результирующие модуль и фаза определяются по формулам (1.5)-(1.6):
Заменим последовательное соединение звеньев
|
Рисунок 1.7 - Структурные преобразования
При последовательном соединении удобнее работать с модулями и фазами звеньев. Определим их по формулам (1.9)-(1.10):
По формулам (1.11)-(1.12) определим общую вещественную и общую мнимую составляющие:
| 10 |
| 17 |
|
| 11 |
|
|
| i=1,7 |
| Pi,w=0,w1=1 w2=0.01 |
| φi = -arctg (Ti * wi) |
| |
| |
| |
| |
| начало |
| |
| |
| 2 |
| 3 |
| 4 |
| 5 |
| 6 |
| 7 |
| 8 |
| 9 |
| |
| |
| |
| нет |
| да |
| да |
| |
| |
| 11 |
| 12 |
| 13 |
| 14 |
| 15 |
| |
| |
| 18 |
| нет |
| да |
| 16 |
| 17 |
| |
| |
| W<W1 |
| W=W1=W2 |
| конец |
| 18 |
| 19 |
| 20 |
| 21 |
| А |
| А |
| нет |
| да |
|
Текст разработанной программы приведён на рисунке 1.9.
При разработке были введены следующие идентификаторы:
W- начальное значение диапазона изменения частоты, а также для хранения текущего значения частоты;
W1- конечное значение частоты;
W2- шаг изменения частоты.
Для ввода значений параметров звеньев
OPEN "A:\mm_8.txt" FOR OUTPUT AS #2
CLS : Pi = 3.141592654#: W = 0: W1 = 1: W2 = .05
DIM K(7), T(7)
DATA 1,10,2,15,1,20,2,5,4,10,3,12,1,8
FOR i = 1 TO 7
READ K(i), T(i)
PRINT USING "K(#)=#, T(#)=##"; i; K(i); i; T(i)
NEXT i
10 FOR i = 1 TO 7
A(i) = K(i) / SQR(T(i) ^ 2 * W ^ 2 + 1)
F(i) = -ATN(T(i) * W)
P(i) = A(i) * COS(F(i))
Q(i) = A(i) * SIN(F(i))
NEXT i
REM ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ
Pe(1) = P(1) + P(4)
Qe(1) = Q(1) + Q(4)
Ae(1) = SQR(Pe(1) ^ 2 + Qe(1) ^ 2)
Fe(1) = ATN(Qe(1) / Pe(1))
IF Pe(1) < 0 THEN Fe(1) = Fe(1) – Pi
REM ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ
Pe(2) = P(2) + P(5)
Qe(2) = Q(2) + Q(5)
Ae(2) = SQR(Pe(2) ^ 2 + Qe(2) ^ 2)
Fe(2) = ATN(Qe(2) / Pe(2))
Рисунок 1.9, лист1- Листинг программы.
IF Pe(2) < 0 THEN Fe(2) = Fe(2) – Pi
REM ПОСЛЕДОВАТЕЛЬНОЕ СОЕДИНЕНИЕ
Ae(3) = Ae(1) * Ae(2)
Fe(3) = Fe(1) + Fe(2)
Pe(3) = Ae(3) * COS(Fe(3))
Qe(3) = Ae(3) * SIN(Fe(3))
REM ПОСЛЕДОВАТЕЛЬНОЕ СОЕДИНЕНИЕ
Ae(4) = A(6) * A(7)
Fe(4) = F(6) + F(7)
Pe(4) = Ae(4) * COS(Fe(4))
Qe(4) = Ae(4) * SIN(Fe(4))
REM ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ
Pe(5) = Pe(3) + Pe(4)
Qe(5) = Qe(3) + Qe(4)
Ae(5) = SQR(Pe(5) ^ 2 + Qe(5) ^ 2)
Fe(5) = ATN(Qe(5) / Pe(5))
IF Pe(5) < 0 THEN Fe(5) = Fe(5) - Pi
REM ПОСЛЕДОВАТЕЛЬНОЕ СОЕДИНЕНИЕ
Ae(6) = Ae(5) * A(3)
Fe(6) = Fe(5) + F(3)
Pe(6) = Ae(6) * COS(Fe(6))
Qe(6) = Ae(6) * SIN(Fe(6))
PRINT USING "W=#.##, Ae(#)=+##.###, Fe(#)=+#.###, Pe(#)=+##.###, Qe(#)=+#.###"; W; 6; Ae(6); 6; Fe(6); 6; Pe(6); 6; Qe(6)
PRINT #2, USING "#.## +##.### +#.### +##.### +##.###"; W; Ae(6); Fe(6); Pe(6); Qe(6)
REM ПРОВЕРКА ДИАПАЗОНА ЧАСТОТЫ
IF W < W1 THEN W = W + W2
IF W < W1 THEN GOTO 10
CLOSE #2
END
Рисунок 1.9, лист 2- Листинг программы моделирования в частотной области
Полученные результаты занесём в таблицу 1.1
Таблица 1.1 – Результаты расчетов

 По полученным данным построим графики, рис. 1.9 – 1.11
По полученным данным построим графики, рис. 1.9 – 1.11
Рисунок 1.10 – Комплексная частотная характеристика соединения звеньев
Рисунок 1.11 – Амплитудно-частотная характеристика соединения звеньев

Рисунок 1.12 - Фазо-частотная характеристика соединения звеньев
2 МОДЕЛИРОВАНИЕ ВО ВРЕМЕННОЙ ОБЛАСТИ
Провести моделирование во временной области соединения звеньев представленных на рисунке 2.1.
Рисунок 2.1 – Схема соединения звеньев
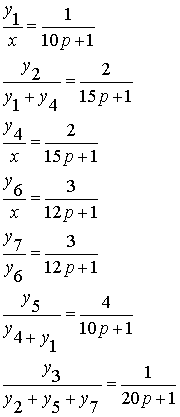
Передаточные функции элементов имеют вид:
Прежде чем перейти к моделированию во временной области необходимо составить в соответствии с заданной структурой соединения элементов, систему дифференциальных уравнений, которой будет описываться заданная система. При этом следует помнить, что все численные методы дают наиболее точное решение для дифференциальных уравнений первого порядка.
Передаточной функцией называется отношение изображения по Лапласу выходной величины, к изображению по Лапласу входной величине при нулевых начальных условиях, формула (2.1):
(2.1)
Составим систему дифференциальных уравнений в соответствии с (2.1):
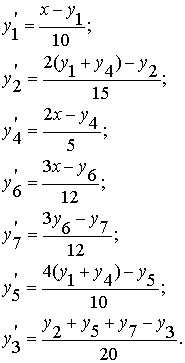
Преобразуем полученные формулы:
SHAPE \* MERGEFORMAT
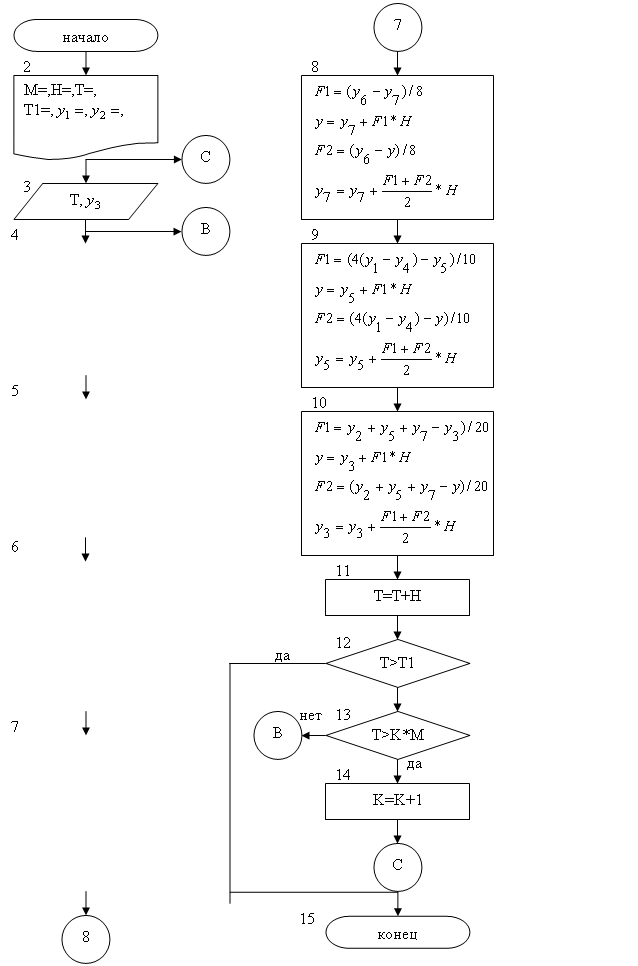
Текст разработанной программы приведён на рисунке 2.3. При разработке программы были введены следующие идентификаторы:
T – начальное значение,
T1 – конечное значение,
H – шаг интегрирования,
М – шаг печати,
К – для организации печати с принятым шагом.
Для вычисления правых частей уравнения системы введены идентификаторы F1-F2. Текущее значение интегральной кривой, являющейся выходной функцией, хранящееся в переменной Y3.
CLS
PRINT "Моделирование во временной области"
PRINT "Введите M, H, T, T1"
INPUT M, H, T, T1
YI = 0: Y2 = 0: Y3 = 0: Y4 = 0: Y5 = 0: Y6 = 0: Y7 = 0: K = 1: X = 1
15 PRINT "T="; T, "Y3="; Y3
20 F1 = (X - Y1) / 10: Y = Y1 + F1 * H
F2 = (X - Y) / 10: Y1 = Y1 + ((F1 + F2) / 2) * H
F1 = (2 * (Y1 + Y4) - Y2) / 15: Y = Y2 + F1 * H
F2 = (2 * (Y1 + Y4) - Y) / 15: Y2 = Y2 + ((F1 + F2) / 2) * H
F1 = (2 * X - Y4) / 5: Y = Y4 + F1 * H
F2 = (2 * X - Y) / 5: Y4 = Y4 + ((F1 + F2) / 2) * H
F1 = (3 * X - Y6) / 12: Y = Y6 + F1 * H
F2 = (3 * X - Y) / 12: Y6 = Y6 + ((F1 + F2) / 2) * H
F1 = (Y6 - Y7) / 8: Y = Y7 + F1 * H
F2 = (Y6 - Y) / 8: Y7 = Y7 + ((F1 + F2) / 2) * H
F1 = (4 * (Y1 + Y4) - Y5) / 10: Y = Y5 + F1 * H
F2 = (4 * (Y1 + Y4) - Y) / 10: Y5 = Y5 + ((F1 + F2) / 2) * H
F1 = (Y2 + Y5 + Y7 - Y3) / 20: Y = Y3 + F1 * H
F2 = (Y2 + Y5 + Y7 - Y) / 20: Y3 = Y3 + ((F1 + F2) / 2) * H
T = T + H
IF T > T1 THEN 100
IF T >= K * M THEN 80 ELSE 85
80 K = K + 1: GOTO 15
85 GOTO 20
CLS
100 END
Рисунок 2.3 – Листинг программы моделирования во временной области
После запуска программы были получены значения T и Y приведенные в таблице 2.1.
Таблица 2.1 – Значения T и Y

 По значениям, взятым из таблицы 2.1 построим переходную функцию соединения, приведенную на рисунке 2.4.
По значениям, взятым из таблицы 2.1 построим переходную функцию соединения, приведенную на рисунке 2.4.
Рисунок 2.4 – График переходной функции заданной системы.
ЗАКЛЮЧЕНИЕ
В данной работе мы рассмотрели моделирование в частотной и во временной областях. По полученным данным построили Амплитудно-фазную характеристику, амплитудно-частотную характеристику, фазо-частотную характеристику (моделирование в частотной области) и переходный процесс (моделирование во временной области). Программное обеспечение было разработано на алгоритмическом языке Microsoft QuickBASIC. При построении графиков был использован пакет Mathcad 11 Enterprise Edition.
ПЕРЕЧЕРЬ ССЫЛОК
1. Бесерский В.А., Попов Е.П., Теория систем автоматического регулирования. – М.: Наука, 1972. – 798 с.
Fe(3) = Fe(1) + Fe(2)
Pe(3) = Ae(3) * COS(Fe(3))
Qe(3) = Ae(3) * SIN(Fe(3))
REM ПОСЛЕДОВАТЕЛЬНОЕ СОЕДИНЕНИЕ
Ae(4) = A(6) * A(7)
Fe(4) = F(6) + F(7)
Pe(4) = Ae(4) * COS(Fe(4))
Qe(4) = Ae(4) * SIN(Fe(4))
REM ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ
Pe(5) = Pe(3) + Pe(4)
Qe(5) = Qe(3) + Qe(4)
Ae(5) = SQR(Pe(5) ^ 2 + Qe(5) ^ 2)
Fe(5) = ATN(Qe(5) / Pe(5))
IF Pe(5) < 0 THEN Fe(5) = Fe(5) - Pi
REM ПОСЛЕДОВАТЕЛЬНОЕ СОЕДИНЕНИЕ
Ae(6) = Ae(5) * A(3)
Fe(6) = Fe(5) + F(3)
Pe(6) = Ae(6) * COS(Fe(6))
Qe(6) = Ae(6) * SIN(Fe(6))
PRINT USING "W=#.##, Ae(#)=+##.###, Fe(#)=+#.###, Pe(#)=+##.###, Qe(#)=+#.###"; W; 6; Ae(6); 6; Fe(6); 6; Pe(6); 6; Qe(6)
PRINT #2, USING "#.## +##.### +#.### +##.### +##.###"; W; Ae(6); Fe(6); Pe(6); Qe(6)
REM ПРОВЕРКА ДИАПАЗОНА ЧАСТОТЫ
IF W < W1 THEN W = W + W2
IF W < W1 THEN GOTO 10
CLOSE #2
END
Рисунок 1.9, лист 2- Листинг программы моделирования в частотной области
Полученные результаты занесём в таблицу 1.1
Таблица 1.1 – Результаты расчетов
| ω | Ae(6) | Fe(6) | Pe(6) | Qe(6) |
| 0.00 | +21.000 | +0.000 | +21.000 | +0.000 |
| 0.05 | +11.973 | -1.631 | -0.718 | -11.951 |
| 0.10 | +4.996 | -2.523 | -4.071 | -2.896 |
| 0.15 | +2.328 | -3.030 | -2.313 | -0.258 |
| 0.20 | +1.227 | -3.354 | -1.199 | +0.259 |
| 0.25 | +0.712 | -3.578 | -0.646 | +0.301 |
| 0.30 | +0.446 | 3.741 | -0.368 | +0.251 |
| 0.35 | +0.295 | -3.864 | -0.221 | +0.195 |
| 0.40 | +0.205 | -3.961 | -0.140 | +0.150 |
| 0.45 | +0.147 | -4.038 | -0.092 | +0.115 |
| 0.50 | +0.110 | -4.102 | -0.063 | +0.090 |
| 0.55 | +0.083 | -4.154 | -0.044 | +0.071 |
| 0.60 | +0.065 | -4.199 | -0.032 | +0.057 |
| 0.65 | +0.052 | -4.237 | -0.024 | +0.046 |
| 0.70 | +0.042 | -4.270 | -0.018 | +0.038 |
| 0.75 | +0.034 | -4.298 | -0.014 | +0.031 |
| 0.80 | +0.028 | -4.324 | -0.011 | +0.026 |
| 0.85 | +0.024 | -4.346 | -0.008 | +0.022 |
| 0.90 | +0.020 | -4.366 | -0.007 | +0.019 |
| 0.95 | +0.017 | -4.384 | -0.005 | +0.016 |
| 5 |
| 0 |
| 5 |
| 10 |
| 15 |
| 20 |
| 25 |
| 15 |
| 10 |
| 5 |
| 5 |
| Q |
| P |
 |
Рисунок 1.10 – Комплексная частотная характеристика соединения звеньев
| 0 |
| 0.1 |
| 0.2 |
| 0.3 |
| 0.4 |
| 0.5 |
| 5 |
| 10 |
| 15 |
| 20 |
| 25 |
| А |
| ω |
 | |||
| |||
Рисунок 1.11 – Амплитудно-частотная характеристика соединения звеньев
| 0 |
| 0.2 |
| 0.4 |
| 0.6 |
| 0.8 |
| 5 |
| 4 |
| 3 |
| 2 |
| 1 |
| ω |
| |
Рисунок 1.12 - Фазо-частотная характеристика соединения звеньев
2 МОДЕЛИРОВАНИЕ ВО ВРЕМЕННОЙ ОБЛАСТИ
Провести моделирование во временной области соединения звеньев представленных на рисунке 2.1.
|
|
|
|
|
|
| W4(P) |
| W5(P) |
| W6(P) |
| W7(P) |
| y4 |
| y5 |
| y7 |
| y6 |
 | |||
Рисунок 2.1 – Схема соединения звеньев
Передаточные функции элементов имеют вид:
Прежде чем перейти к моделированию во временной области необходимо составить в соответствии с заданной структурой соединения элементов, систему дифференциальных уравнений, которой будет описываться заданная система. При этом следует помнить, что все численные методы дают наиболее точное решение для дифференциальных уравнений первого порядка.
Передаточной функцией называется отношение изображения по Лапласу выходной величины, к изображению по Лапласу входной величине при нулевых начальных условиях, формула (2.1):
Составим систему дифференциальных уравнений в соответствии с (2.1):
Преобразуем полученные формулы:
|

|

|

|

|
|
| начало |
| M=,H=,T=, T1=, |
| 2 |
| T, |
| C |
| 3 |
| B |
| 4 |
| 5 |
| 6 |
| 7 |
| 8 |
| 7 |
| |
| 8 |
| |
| |
| T=T+H |
| 9 |
| 10 |
| 11 |
| T>T1 |
| T>K*M |
| B |
| K=K+1 |
| C |
| 12 |
| 13 |
| 14 |
| 15 |
| конец |
| да |
| да |
| нет |
Текст разработанной программы приведён на рисунке 2.3. При разработке программы были введены следующие идентификаторы:
T – начальное значение,
T1 – конечное значение,
H – шаг интегрирования,
М – шаг печати,
К – для организации печати с принятым шагом.
Для вычисления правых частей уравнения системы введены идентификаторы F1-F2. Текущее значение интегральной кривой, являющейся выходной функцией, хранящееся в переменной Y3.
CLS
PRINT "Моделирование во временной области"
PRINT "Введите M, H, T, T1"
INPUT M, H, T, T1
YI = 0: Y2 = 0: Y3 = 0: Y4 = 0: Y5 = 0: Y6 = 0: Y7 = 0: K = 1: X = 1
15 PRINT "T="; T, "Y3="; Y3
20 F1 = (X - Y1) / 10: Y = Y1 + F1 * H
F2 = (X - Y) / 10: Y1 = Y1 + ((F1 + F2) / 2) * H
F1 = (2 * (Y1 + Y4) - Y2) / 15: Y = Y2 + F1 * H
F2 = (2 * (Y1 + Y4) - Y) / 15: Y2 = Y2 + ((F1 + F2) / 2) * H
F1 = (2 * X - Y4) / 5: Y = Y4 + F1 * H
F2 = (2 * X - Y) / 5: Y4 = Y4 + ((F1 + F2) / 2) * H
F1 = (3 * X - Y6) / 12: Y = Y6 + F1 * H
F2 = (3 * X - Y) / 12: Y6 = Y6 + ((F1 + F2) / 2) * H
F1 = (Y6 - Y7) / 8: Y = Y7 + F1 * H
F2 = (Y6 - Y) / 8: Y7 = Y7 + ((F1 + F2) / 2) * H
F1 = (4 * (Y1 + Y4) - Y5) / 10: Y = Y5 + F1 * H
F2 = (4 * (Y1 + Y4) - Y) / 10: Y5 = Y5 + ((F1 + F2) / 2) * H
F1 = (Y2 + Y5 + Y7 - Y3) / 20: Y = Y3 + F1 * H
F2 = (Y2 + Y5 + Y7 - Y) / 20: Y3 = Y3 + ((F1 + F2) / 2) * H
T = T + H
IF T > T1 THEN 100
IF T >= K * M THEN 80 ELSE 85
80 K = K + 1: GOTO 15
85 GOTO 20
CLS
100 END
Рисунок 2.3 – Листинг программы моделирования во временной области
После запуска программы были получены значения T и Y приведенные в таблице 2.1.
Таблица 2.1 – Значения T и Y
| T | Y |
| 0 | 0 |
| 20.00036 | 4.917364 |
| 40.00929 | 12.89664 |
| 60.00594 | 17.53008 |
| 80.00868 | 19.61416 |
| 100.003 | 20.46468 |
| 120.0072 | 20.79692 |
| 140.0023 | 20.92336 |
| 160.0013 | 20.97077 |
| 180.0004 | 20.98832 |
| 200.0094 | 20.99452 |
| 220.0084 | 20.99666 |
| 240.0074 | 20.99666 |
| 260.0025 | 20.99666 |
| 280.002 | 20.99666 |
| 300.0015 | 20.99666 |
| 0 |
| 50 |
| 100 |
| 150 |
| 200 |
| 250 |
| 300 |
| 350 |
| 5 |
| 10 |
| 15 |
| 20 |
| 25 |
| Y |
| T |
 | |||
Рисунок 2.4 – График переходной функции заданной системы.
ЗАКЛЮЧЕНИЕ
В данной работе мы рассмотрели моделирование в частотной и во временной областях. По полученным данным построили Амплитудно-фазную характеристику, амплитудно-частотную характеристику, фазо-частотную характеристику (моделирование в частотной области) и переходный процесс (моделирование во временной области). Программное обеспечение было разработано на алгоритмическом языке Microsoft QuickBASIC. При построении графиков был использован пакет Mathcad 11 Enterprise Edition.
ПЕРЕЧЕРЬ ССЫЛОК
1. Бесерский В.А., Попов Е.П., Теория систем автоматического регулирования. – М.: Наука, 1972. – 798 с.