Реферат на тему Автоматизация производственных процессов
Работа добавлена на сайт bukvasha.net: 2015-06-25Поможем написать учебную работу
Если у вас возникли сложности с курсовой, контрольной, дипломной, рефератом, отчетом по практике, научно-исследовательской и любой другой работой - мы готовы помочь.

Предоплата всего

Подписываем
Министерство образования РФ.
Московская Государственная Академия Приборостроения и Информатики.
Балашихинский филиал.
Курсовой проект.
Автоматизация производственных процессов.
Студент:_____/Беззубиков В.В./
5-й курс группа БФ-2
Шифр: 95743
Отметка о зачёте______
Преподаватель:______/Албагачиев А.Ю./
МГАПИ 1999г.
1. Введение.
Автоматы могут работать в тяжёлых, вредных и опасных для здоровья человека условиях. Поэтому автоматизация производства полностью исключает или существенно снижает отрицательное воздействие производственного процесса на человека, поскольку человек заменяется автоматами различного служебного назначения.
Экономические преимущества использования автоматических систем в производстве вытекают из их технических преимуществ. К экономическим преимуществам автоматизации можно отнести: возможность значительного повышения производительности труда; более экономичное использование физического труда, материалов и энергии; более высокое и стабильное качество продукции; сокращение периода времени от возникновения потребности в изделии до получения готовой продукции; возможность расширения производства без увеличения трудовых ресурсов.
2. Исходные данные.
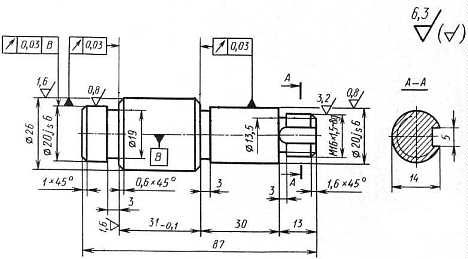
Наименование детали – корпус.
Деталь относится к корпусу запорного клапана. Форма корпуса клапана – проходной.
Материал – Латунь ЛЖМц 59-1-1 ГОСТ 15527-70.
Заготовка – штамповка, обрубленная, зачищенная.
Масса заготовки – 4.1 кг, масса детали – 2.1 кг.
Годовой объём выпуска, шт.: N = 2000 .
Определение типа производства.
Определить тип производства можно по коэффициенту k.
k = t с / tшс
где t с - средний производственный такт;
tшс - среднее штучное время изготовления детали по всем
операциям (0.86ч = 51.6 мин);
t с = 60*Fдс / N
где Fдс - действительный фонд рабочего времени (3988.64 ч);
N - годовой выпуск (2000 шт);
t с = 60*3988.64/2000= 119.75
k =119.75/51.6= 2.3
Т.к. k > 1 это будет крупносерийное производство.
5. Выбор операции для работотизации.
Подготовка баз на обрабатываемой детали производится вне РТК. Деталь полностью обрабатывается в условиях РТК за одну операцию, что значительно повышает точность обработки, т.к. не происходит смена баз. Поэтому выбираю операцию №115 – комбинированную.
6. Схемы базирования и установки.
Схема базирования и установки на тактовом столе (см.Рис.6.1.)
Базирование по черной наружной цилиндрической поверхности. Для реализации принятой схемы базирования принял три неподвижных установочных элемента - две призмы и пластина. Данная схема предпочтительна тем, что приспособления базирования и установки, установленные на платформах тактового стола, не требуют переналадки при групповой обработке.
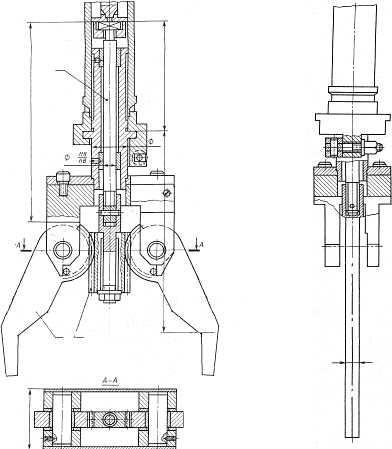
Схема базирования в захватном устройстве (см.Рис.6.2.).
Базирование по черной наружной цилиндрической поверхности. Для реализации принятой схемы базирования принял захват, у которого конфигурация одной губки в виде призмы, а вторая в виде штыря.
Схема базирования и установки на станке (см.Рис.6.3.).
Базирование по черной наружной цилиндрической поверхности. Для реализации принятой схемы базирования принял три неподвижных установочных элемента - три призмы. Соблюдён принцип постоянства баз, т.к. данная схема базирования позволяет обрабатывать заготовку с трёх сторон. Сила закрепления действует сверху на технологический буртик.
7. Выбор технологического оборудования.
Заготовка обрабатывается в режиме “по кадрам”
на станке – 2206ВМФ4; УЧПУ – 2С42 – многоцелевой (сверлильно-фрезерно-расточной) горизонтальный станок высокой точности с инструментальным магазином и с комбинированной системой ЧПУ.
Техническая характеристика станка 2206ВМФ4.
Размеры рабочей поверхности стола: 630´ 800
Наибольшая масса обрабатываемой заготовки, кг: 800
Наибольшие перемещения стола, мм:
продольное: 800
поперечное: 630
шпиндельной головки (бабки) вертикальное: 630
Расстояние от оси шпинделя до рабочей поверхности стола: 95-725
Расстояние от торца шпинделя до центра стола: 165-795
Конус отверстия шпинделя (по ГОСТ 15945-82): 50
Вместимость инструментального магазина, шт.: 30
Число ступеней вращения шпинделя, об/мин: 19
Частота вращения шпинделя, об/мин: 31.5-2500
Число рабочих подач: 31
Рабочие подачи (продольная, поперечная, вертикальная), мм/об: 1-4000
Наибольшая сила подачи стола, МН: 10
Скорость быстрого перемещения (стола и бабки), мм/мин: 10000
Мощность двигателя привода главного движения, кВТ: 11
Габаритные размеры, мм:
длина: 5480
ширина: 5115
высота: 3130
Масса, кг: 15000
Число управляемых координат одновременно: 3
8. Выбор промышленного робота.
Для обслуживания станка выбираю промышленный робот модели М20П.40.01, т.к. его техническая характеристика удовлетворяет по всем параметрам.
Техническая характеристика робота М20П.40.01.
Грузоподъёмность, суммарная/на одно захватное устройство, кг:
20/10
Число ступеней подвижности (без захватного устройства): 5
Число рук/захватных устройств на руку: 1/2
Тип привода: электропневматический
Управление: позиционное
Число программируемых координат: 5
Способ программирования перемещения: обучение
Вместимость памяти системы, число точек: 300
Погрешность позиционирования, мм: ± 1.0
Наибольший вылет руки, мм: 800
Масса, кг: 570
Габаритные размеры, мм:
высота: 2359
max длина: 2385
Максимальный угол поворота: 300°
9. Расчёт контактных напряжений.
Для расчёта контактного напряжения использую формулу:
Q* l1 – W*( l1 + l2) = 0
где:
Q = 1.3*P*(W1/g+1)*(0.63*b/a+1.5*a1*b/(b1+0.1*d)*a)*k
P = m*g = 4.1*9.8= 40.18 Н
где а,b – размеры захватов
d – диаметр заготовки
a1 – расстояние от края зажимных губок до центра
тяжести заготовки
b1 – ширина зева захвата
W1 – ускорение, возникающее при движении захвата
k – коэффициент запаса k = 1.2¸ 2
а = 0.03 м; b = 0.045 м
a1 = 0.035 м; b1 = 0.03 м
d = 0.05 м
k = 1.5
Q = 1.3*40.18*(1.9+1)*(0.63*0.045/0.03 + 1.5*0.035*0.045/
/ (0.03+0.1*0.05)*0.03)*1.5 = 725.96 Н
Напряжение на контактном звене:
где l1 = 1.044 м
l2 = 0.8 м
725.96*1.044 – W*(1.044+0.8) = 0
W = 411 H
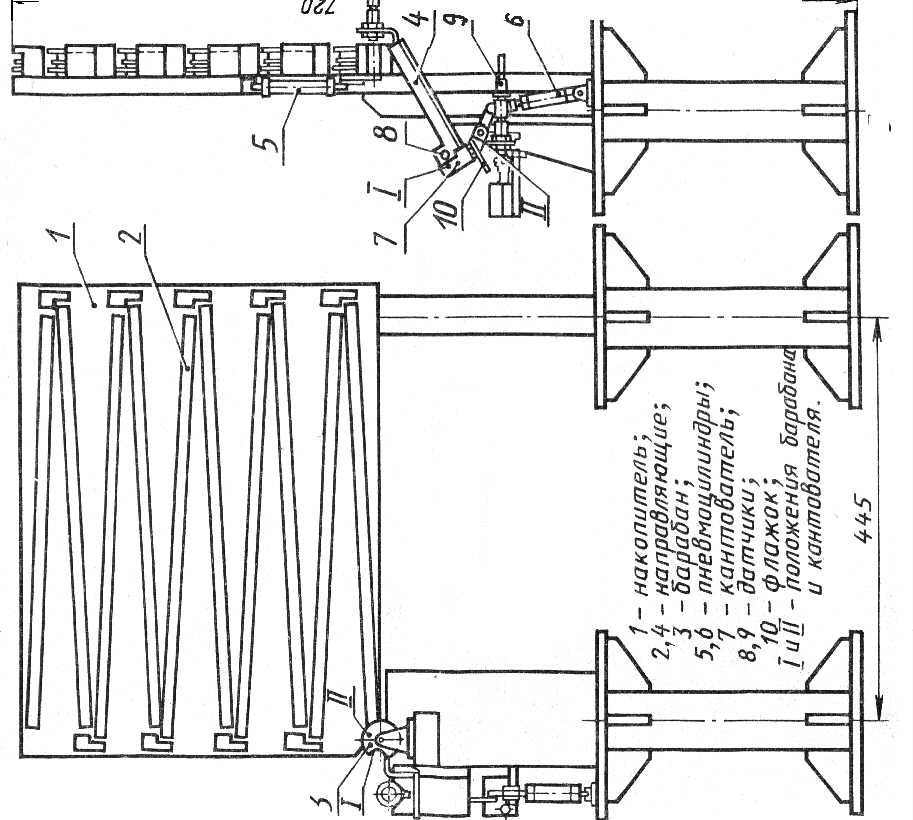
10. Выбор загрузочного устройства.
Загрузочное устройство выполнено в виде тактового стола типа СТ220, на платформы которого устанавливаются в ориентированном виде заготовки и обработанные детали.
Технические характеристики тактового стола СТ220.
Габаритные размеры, мм:
длина: 3000
ширина: 650
Скорость перемещения: 0.25 м/с.
Способ установки заготовки и готовой детали на платформе тактового стола см. Рис. 10.1.
11. Схема компоновки РТК.
Роботизированный комплекс на базе промышленного робота модели М20П.40.01, станка модели 2206ВМФ4, УЧПУ – 2С42 и тактового стола СТ220.
Промышленный робот берёт заготовку с тактового стола, загружает деталь и затем возвращает обработанную деталь на тактовый стол.
12. Последовательность перехода выполнения на РТК.
13. Составление циклограммы.
Описание циклограммы представленной на листе 1 чертеж 4.
Промышленный робот.
Начало цикла.
Выдвиг руки к тактовому столу. Время – 1 с.
Зажим заготовки. Время – 1 с.
Движение руки вверх вместе с заготовкой. Время – 1 с.
Поворот руки от тактового стола к станку на 90° . Время – 2 с.
Движение руки вниз к месту обработки. Время – 1 с.
Разжим заготовки. Время – 1 с.
Вдвиг руки. Время – 1с.
Станок.
Зажим заготовки на станке зажимным устройством. Время – 1с.
Обработка детали. Время – 3096 с (51.6 мин).
Разжим обработанной детали. Время – 1 с.
Промышленный робот.
Выдвиг руки. Время – 1с.
Зажим детали. Время – 1 с.
Движение руки вверх вместе с деталью. Время –1 с.
Поворот руки от станка к тактовому столу на 90° .Время – 1с.
Движение руки вниз к тактовому столу. Время – 1 с.
Разжим детали. Время – 1 с.
Вдвиг руки. Время – 1 с.
Тактовый стол.
Поворот тактового стола со скоростью 0.25 м/с на одну позицию. Время – 2 с.
Конец цикла.
Общее время цикла – 3121 с (52.017 мин).
| Обозначение | Наименование | Кол. | |||||||
| Документация | |||||||||
| Компоновка РТК | |||||||||
| Наименование | |||||||||
| 1 | Робот “Циклон-5.02” | 1 | |||||||
| 2 | Станок 3М151Ф2 | 1 | |||||||
| 3 | Бункерное ЗУ | 1 | |||||||
| 4 | Накопитель | 1 | |||||||
| 5 | УУ ПР | 1 | |||||||
| Изм. Лист Разраб. Провер. | № докум. Кудряшов Д.В. Албагачиев А.Ю | Подп. | Дата | Схема компоновки РТК | Лит. Масса Масшт. Лист Листов | ||||
| МГАПИ | |||||||||
| Обозначение | Наименование | Кол. | ||||||||
| Документация | ||||||||||
| Бункерное ЗУ | ||||||||||
| Наименование | ||||||||||
| 1 | Накопитель | 1 | ||||||||
| 2 | Направляющая | 1 | ||||||||
| 3 | Барабан | 1 | ||||||||
| 4 | Направляющая | 1 | ||||||||
| 5 | Пневмоцилиндр | 1 | ||||||||
| 6 | Пневмоцилиндр | 1 | ||||||||
| 7 | Кантователь | 1 | ||||||||
| 8 | Датчик | 1 | ||||||||
| 9 | Датчик | 1 | ||||||||
| 10 | Флажок | 1 | ||||||||
| Изм. Лист Разраб. Провер. | № докум. Кудряшов Д.В. Албагачиев А.Ю. | Подп. | Дата | Бункерное загрузочное устройство | Лит. Масса Масшт.
Лист Листов | |||||
| МГАПИ | ||||||||||
| Обозначение | Наименование | Кол. | ||||||||
| Документация | ||||||||||
| Контрольное ус.-во | ||||||||||
| Наименование | ||||||||||
| 1 | Наконечник | 2 | ||||||||
| 2 | Измерительн. ножка | 2 | ||||||||
| 3 | Каретка | 2 | ||||||||
| 4 | Микрометрич. винт | 2 | ||||||||
| 5 | Серьга с пружиной | 2 | ||||||||
| 6 | Стакан | 1 | ||||||||
| 7 | Плоская пружина | 2 | ||||||||
| 8 | Эксцентрик | 2 | ||||||||
| 9 | Упор | 2 | ||||||||
| 10 | Планка | 1 | ||||||||
| 11 | Кабель | 1 | ||||||||
| 12 | Зажим | 1 | ||||||||
| 13 | Преобразователь | 1 | ||||||||
| Изм. Лист Разраб. Провер. | № докум. Кудряшов Д.В. Албагачиев А.Ю. | Подп. | Дата | Контрольное устройство (индуктивная скоба) | Лит. Масса Масшт.
Лист Листов | |||||
| МГАПИ | ||||||||||