Курсовая на тему Организация управления гибким производственным комплексом на основе системы ЧПУ
Работа добавлена на сайт bukvasha.net: 2015-05-30Поможем написать учебную работу
Если у вас возникли сложности с курсовой, контрольной, дипломной, рефератом, отчетом по практике, научно-исследовательской и любой другой работой - мы готовы помочь.

Предоплата всего
от 25%

Подписываем
договор
Содержание
Ведение
1. Техническая характеристика станка
2. Техническая характеристика робота
3. Алгоритм управления
3.1 Описание исходного состояния автоматизированного комплекса
3.2 Словесное описание алгоритма работы комплекса
4. Разработка сети Петри
4.1 Построение дерева иерархии
4.2 Построение сложной сети Петри и расчет дублеров
5. Построение ременно-контактной схемы
6. Построение циклограммы
7. Проверка составления РКС
8. Составление бесконтактной логической схемы
9. Составление управляющей циклограммы
Список литературы
Введение
Программные устройства в настоящее время находят все более широкое применение в различных отраслях машиностроения для автоматизации управления агрегатами или техническими процессами: резанием, раскроем и обработкой давлением, сборкой, контролем и транспортировкой детали, приготовлением смесей, контролем и соединением проводов и др.
Системы головного программного управления. В них режимы обработки и информация о формообразующей траектории движения инструмента задаются с помощью чисел. Системы этого класса осуществляют числовое управление трех видов: двухкоординатное управление, которое часто называют прямоугольным или ступенчатым управлением и контурное (непрерывное) управление или управление движением.
В данной работе будут показаны способы организации управления гибким производственным комплексом на основе системы ЧПУ различными методами.
1. Техническая характеристика станка
В разрабатываемом гибком производственном модуле для обработки тел вращения применяется станок модели 16К20Ф3 с системой ЧПУ.
Характеристики станка:
Наибольший диаметр обрабатываемой заготовки, мм:
- над станиной 400
- над суппортом 220
Число инструментов 6
Число частот вращения шпинделя 12 (по прог. 6)
Частота вращения шпинделя, мин –1 35 – 1600
Регулирование подач бесступенчатое
Подача, мм/мин:
- продольная 3 – 200
- поперечная 3 – 500
Скорость быстрых перемещений, мм/мин:
- продольных 4800
- поперечных 2400
Дискретность перемещений, мм:
- продольных 0,01
- поперечных 0,005
Габаритные размеры станка, мм:
- длина 3360
- высота 1710
- ширина 1750
2. Техническая характеристика робота
В разрабатываемом гибком производственном модуле для обработки тел вращения применяется промышленный робот УМ 2.160.ПР2.
Техническая характеристика:
Число степеней подвижности 4
Перемещение руки в горизонтальном направлении, мм 0,0 – 6000
Вертикальное перемещение, мм 50 – 1500
Углы поворота руки, град 0 – 120
Наибольшая скорость осевого перемещения руки, м/с 1
Наибольшая скорость подъема руки, м/с 0,7
Наибольшая скорость поворота руки, град 90
Наибольшая сила зажима губок схвата, Н 5300
Время зажима губок схвата, с 0,2
Точность позиционирования, мм + - 0,2
Масса манипулятора, кг 555
3. Алгоритм управления
3.1 Описание исходного состояния автоматизированного комплекса
Исходное состояние системы следующее: Робот находится в крайнем правом положении, т.е. датчики S7 и S13 включены; привод транспортера отключен, что соответствует выключенному датчику SрМ5; деталь отсутствует в позиции захвата, т.е. датчик S12 отключен; пиноль станка в крайнем правом положении, т.е. датчик S15 включен; система ЧПУ отключена, что соответствует включенному датчику Sт2 и выключенному датчику Sт1. В соответствии с вышесказанным функция начального состояния запишется в виде:

3.2 Словесное описание алгоритма работы комплекса
По включению кнопки "Пуск" включается привод транспортера SрМ5 до появления детали в зоне захвата, т.е. до включения датчика S12. После этого включается привод подъема руки М6, он работает до того момента пока включается датчик S8. Далее робот включает привод захвата М9 до появления сигнала с датчика S6. После этого включается привод подъема робота М6 до включения датчика S13. Затем включается привод перемещения робота М10 и робот перемещается от датчика S7 до датчика S4. Далее включается привод поворота робота М7. Рука робота поворачивается в пространстве на 90 град до включения датчика S5. После этого идет включение привода подъема робота М6 и он опускается до положения S10. После чего включается привод М8 до зажима детали на станке, что означает срабатывание датчиков S9 и S11. После этого робот опускает деталь включением двигателя М9 до исчезновения сигнала с датчика S6. Далее робот поднимается до положения S14 включается процесс обработки детали, что обозначается датчиком включения Sт1. Робот опускается до положения S10. Затем включается привод зажима детали до появления сигнала с датчика S6. Как только робот захватит деталь, включается привод пиноли М8. Пиноль отдвигается в крайнее правое положение и включает датчик S15. Робот поднимается до положения S14. Датчик S14 выключает привод подъема робота М6. После этого робот поворачивается в пространстве на 90 град и исчезновение сигнала датчика S5 выключает привод М7. Затем включается привод перемещения робота в горизонтальном положении. Робот перемещается в крайнее левое положение и включает датчик S3. Далее включается привод подъема робота М6 и он опускается в положение включения датчика S2. Затем включается привод захвата детали М9. Робот опускает деталь в бункер, что означает исчезновение сигнала с датчика S6. После чего робот поднимается и включает датчик S6. Деталь, попав в бункер, движется за счет своей массы вниз и включает датчик S1. Как только появится сигнал с датчика S1, включается привод перемещения робота М10 и он перемещается до положения включения датчика S7. Процесс повторяется.
4. Разработка сети Петри
Таблица 1 – Соответствие датчиков обозначениям в сети Петри.
На основе описания алгоритма строим сеть Петри.
Способ ее построения опишем на примере:

Рисунок 1 – Участок сети Петри.
На рисунке показан участок сети Петри а именно захват роботом детали.
Вершины графа в виде черточек и обозначенных "t" с последующим номером, называются переходами. Рi – позиция, в обозначении которых указывается от какого и до какого состояния происходит последующий переход. На переходах указывают состояния датчиков, которые позволяют произвести переход. В данном примере переход из позиции Р3 в позицию Р4 переходит по появлению сигнала с датчика S6, после чего привод Y10 отключается, т.е. происходит зажим детали. После построения сети Петри проверяем нет ли в ней "тупиковых" ситуаций. Сеть составлена так, что переход из одного состояния в другое имеет однозначные условия перехода, поэтому "тупиковых" ситуаций нет. В данной сети Петри в каждой ее позиции в любой момент времени может находиться не более одной точки. Следовательно сеть Петри является правильной.
4.1 Построение дерева иерархии
Построение дерева иерархии производим по следующему алгоритму: на верхнем уровне этого дерева находится автоматизированный комплекс, который обозначается Р0. На более низком уровне находятся устройства, составляющие АК, которые оберегаются Р1 … Р4. Ниже показывают операции, которые эти устройства производят и обозначают Р5 … Р12.
В схеме дерева иерархии приняты следующие обозначения:
Р0 – автоматизированный комплекс,
Р1 – станок,
Р2 – робот,
Р3 – транспортер,
Р4 – бункер,
Р5 – загрузка – выгрузка станка станочными механизмами,
Р6 – обработка детали,
Р7 – загрузка станка роботом,
Р8 – выгрузка станка роботом,
Р9 – подача детали к роботу,
Р10 – отвод детали,
Р11 – загрузка станка станочными механизмами,
Р12 – выгрузка станка станочными механизмами,
4.2 Построение сложной сети Петри и расчет дублеров
Из операций, описанных выше можно построить сложную сеть Петри в виде последовательно соединенных дублеров. Сложная сеть Петри состоит из дублеров di, номер которого соответствует позиции Pi дерева иерархии. Дублеры обозначаются двойным кружком. Сложная сеть Петри соответствует следующему алгоритму:
По кнопке "Пуск" (переход t0) происходит загрузка станка роботом (дублер d7); затем происходит загрузка станка станочными механизмами (дублер d11); После этого по переходу t2 происходит обработка детали (дублер d6); далее происходит выгрузка детали станочными механизмами (дублер d12); потом происходит выгрузка станка роботом (дублер d8); после чего происходит отвод детали (дублер d10); и далее цикл повторяется.
5. Построение расчетно-контактной схемы
По описанию алгоритма запишем формулы для механизмов РК.
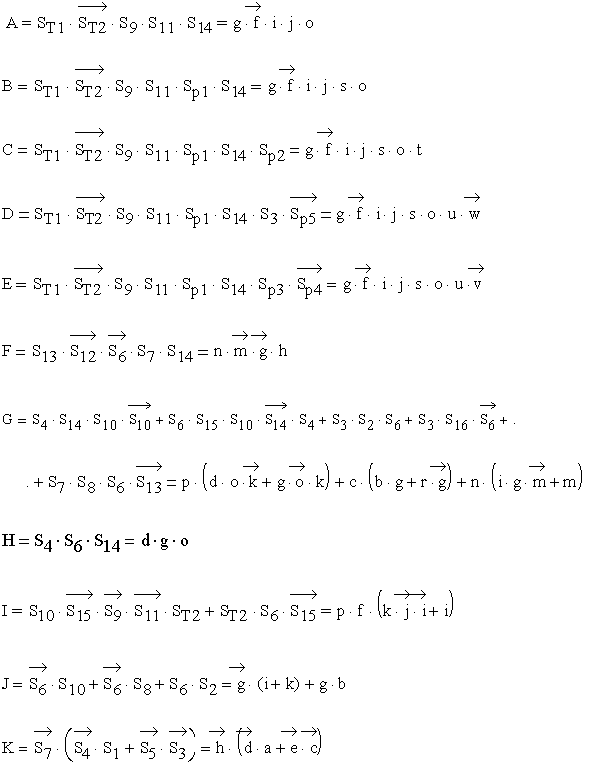
На основе формул строим РКС. Умножение записываем в виде последовательной цепи, а сложение в виде параллельного соединения. Нормально разомкнутые контакты показаны на рисунке 2.1, что соответствует прямому сигналу, нормально замкнутые контакты показаны на рисунке 2.2, что соответствует инверсному состоянию датчиков. Механизм обозначаем релейным объектом 2.3.
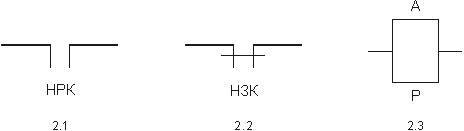
Рисунок 2 – Условные обозначения в РКС
6. Построение циклограммы
На основе сети Петри, а также алгоритма работы комплекса составляем циклограмму, которая представляет собой графическое изображение последовательности работы отдельных механизмов схемы во времени.
Работа элемента и наличие соответствующего этому элементу сигнала изображается на циклограмме отрезком горизонтальной прямой. Толстой линией обозначаются сигналы командных и исполнительных элементов. Слева от отрезка, на границе циклограммы проставляются его обозначения. Большими буквами латинского алфавита обозначаются исполнительные механизмы. Маленькими буквами латинского алфавита – сигналы датчика.
Последовательность работы элементов определяется положением концов отрезков, изображающих их работу, относительно левой границы циклограммы.
Воздействие одного элемента на другой изображается на циклограмме стрелкой указывающей направление воздействия.
Возможны четыре случая:
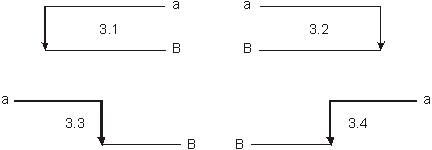
Рисунок 3 – Варианты воздействия датчиков на исполнительные элементы. (3.1 – Случай, когда появление сигнала датчика а приводит к появлению сигнала с исполнительного устройства В
3.2 – Исчезновение сигнала с датчика а приводит к прекращению работы с исполнительного органа В;
3.3 – Исчезновение сигнала с датчика а приводит к началу работы исполнительного органа В;
3.4 – Появление сигнала с датчика а приводит к прекращению работы исполнительного органа В).
Все временное пространство работы комплекса разбивается на такты. Под тактом подразумевается период, в течении которых в схеме не изменяется состояние ни одного из сигналов. На основе вышесказанного строится циклограмма, которая приведена на листе 2 приложения А.
7. Проверка составления РКС
7.1 Проверка по циклограмме
Данная проверка включает в себя еще три проверки. При первой анализируются, существуют ли записанные ранее условия срабатывания в течении всего включающего периода.
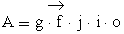
Проверку проведем по функции, составленной для главного привода.
В течении всего цикла работы комплекса условие включения не изменилось, т.е. данная формула удовлетворяет первой проверке.
При второй проверке анализируется, существуют ли записанные ранее условия несрабатывания в течении всего включающего периода. Для функции главного привода таких ситуаций, когда условие несрабатывания бы не выполнялось, нет. Следовательно, данная функция удовлетворяет и второму условию.
Третья проверка заключается в том, чтобы после отключения исполнительного элемента исключить возможность создания условий для его повторного (неправильного) включения. Т.к. функция главного привода представляет собой произведение всех сигналов и удовлетворяет двум предыдущим проверкам, т.е. никаких дополнительных элементов не вводится, то функция А однозначно определяет условия срабатывания и несрабатывания и исключает случай неправильного включения (т.е. функция А равна 1 только при одной комбинации датчиков), то функция А удовлетворяет и третьей проверке. Следовательно функция А составлена правильно.
Ведение
1. Техническая характеристика станка
2. Техническая характеристика робота
3. Алгоритм управления
3.1 Описание исходного состояния автоматизированного комплекса
3.2 Словесное описание алгоритма работы комплекса
4. Разработка сети Петри
4.1 Построение дерева иерархии
4.2 Построение сложной сети Петри и расчет дублеров
5. Построение ременно-контактной схемы
6. Построение циклограммы
7. Проверка составления РКС
8. Составление бесконтактной логической схемы
9. Составление управляющей циклограммы
Список литературы
Введение
Программные устройства в настоящее время находят все более широкое применение в различных отраслях машиностроения для автоматизации управления агрегатами или техническими процессами: резанием, раскроем и обработкой давлением, сборкой, контролем и транспортировкой детали, приготовлением смесей, контролем и соединением проводов и др.
Системы головного программного управления. В них режимы обработки и информация о формообразующей траектории движения инструмента задаются с помощью чисел. Системы этого класса осуществляют числовое управление трех видов: двухкоординатное управление, которое часто называют прямоугольным или ступенчатым управлением и контурное (непрерывное) управление или управление движением.
В данной работе будут показаны способы организации управления гибким производственным комплексом на основе системы ЧПУ различными методами.
1. Техническая характеристика станка
В разрабатываемом гибком производственном модуле для обработки тел вращения применяется станок модели 16К20Ф3 с системой ЧПУ.
Характеристики станка:
Наибольший диаметр обрабатываемой заготовки, мм:
- над станиной 400
- над суппортом 220
Число инструментов 6
Число частот вращения шпинделя 12 (по прог. 6)
Частота вращения шпинделя, мин –1 35 – 1600
Регулирование подач бесступенчатое
Подача, мм/мин:
- продольная 3 – 200
- поперечная 3 – 500
Скорость быстрых перемещений, мм/мин:
- продольных 4800
- поперечных 2400
Дискретность перемещений, мм:
- продольных 0,01
- поперечных 0,005
Габаритные размеры станка, мм:
- длина 3360
- высота 1710
- ширина 1750
2. Техническая характеристика робота
В разрабатываемом гибком производственном модуле для обработки тел вращения применяется промышленный робот УМ 2.160.ПР2.
Техническая характеристика:
Число степеней подвижности 4
Перемещение руки в горизонтальном направлении, мм 0,0 – 6000
Вертикальное перемещение, мм 50 – 1500
Углы поворота руки, град 0 – 120
Наибольшая скорость осевого перемещения руки, м/с 1
Наибольшая скорость подъема руки, м/с 0,7
Наибольшая скорость поворота руки, град 90
Наибольшая сила зажима губок схвата, Н 5300
Время зажима губок схвата, с 0,2
Точность позиционирования, мм + - 0,2
Масса манипулятора, кг 555
3. Алгоритм управления
3.1 Описание исходного состояния автоматизированного комплекса
Исходное состояние системы следующее: Робот находится в крайнем правом положении, т.е. датчики S7 и S13 включены; привод транспортера отключен, что соответствует выключенному датчику SрМ5; деталь отсутствует в позиции захвата, т.е. датчик S12 отключен; пиноль станка в крайнем правом положении, т.е. датчик S15 включен; система ЧПУ отключена, что соответствует включенному датчику Sт2 и выключенному датчику Sт1. В соответствии с вышесказанным функция начального состояния запишется в виде:
3.2 Словесное описание алгоритма работы комплекса
По включению кнопки "Пуск" включается привод транспортера SрМ5 до появления детали в зоне захвата, т.е. до включения датчика S12. После этого включается привод подъема руки М6, он работает до того момента пока включается датчик S8. Далее робот включает привод захвата М9 до появления сигнала с датчика S6. После этого включается привод подъема робота М6 до включения датчика S13. Затем включается привод перемещения робота М10 и робот перемещается от датчика S7 до датчика S4. Далее включается привод поворота робота М7. Рука робота поворачивается в пространстве на 90 град до включения датчика S5. После этого идет включение привода подъема робота М6 и он опускается до положения S10. После чего включается привод М8 до зажима детали на станке, что означает срабатывание датчиков S9 и S11. После этого робот опускает деталь включением двигателя М9 до исчезновения сигнала с датчика S6. Далее робот поднимается до положения S14 включается процесс обработки детали, что обозначается датчиком включения Sт1. Робот опускается до положения S10. Затем включается привод зажима детали до появления сигнала с датчика S6. Как только робот захватит деталь, включается привод пиноли М8. Пиноль отдвигается в крайнее правое положение и включает датчик S15. Робот поднимается до положения S14. Датчик S14 выключает привод подъема робота М6. После этого робот поворачивается в пространстве на 90 град и исчезновение сигнала датчика S5 выключает привод М7. Затем включается привод перемещения робота в горизонтальном положении. Робот перемещается в крайнее левое положение и включает датчик S3. Далее включается привод подъема робота М6 и он опускается в положение включения датчика S2. Затем включается привод захвата детали М9. Робот опускает деталь в бункер, что означает исчезновение сигнала с датчика S6. После чего робот поднимается и включает датчик S6. Деталь, попав в бункер, движется за счет своей массы вниз и включает датчик S1. Как только появится сигнал с датчика S1, включается привод перемещения робота М10 и он перемещается до положения включения датчика S7. Процесс повторяется.
4. Разработка сети Петри
Таблица 1 – Соответствие датчиков обозначениям в сети Петри.
| Обозн. | Расположение | Обозн. РКС | Обозн. Петри | Адрес ЧПУ | Значение |
| S1 | На выход с бункера | а | S1 | 1001 | Готовая деталь вышла |
| S2 | Над бункером | в | S2 | 1002 | Робот над бункером |
| S3 | В крайнем левом положении | c | S3 | 1003 | Робот в крайнем левом положении |
| S4 | Над станком | d | S4 | 1004 | Робот над станком |
| S5 | На роботе | e | S5 | 1005 | Робот повернут на 90 град |
| S6 | На захвате робота | g | S7 | 1006 | Робот захватил деталь |
| S7 | В крайнем правом положении | h | S8 | 1007 | Робот в правом положении |
| S8 | Над зоной захвата детали | i | S9 | 1008 | Робот в зоне захвата детали |
| S9 | На передней бабке станка | j | S10 | 1009 | Деталь зажата на станке |
| S11 | На пиноли | l | S12 | 1010 | _ |
| S12 | На транспортере | m | S13 | 1011 | Деталь в зоне захвата |
| S13 | Над транспортером | n | S14 | 1012 | Робот над транспортером |
| S14 | Над станком | o | S15 | 1013 | Робот над станком |
| S15 | На станке | p | S16 | 1014 | Пиноль отведена |
| S16 | Над бункером | r | S17 | 1015 | Робот над бункером |
| SpM1 | На двигателе главного привода | s | S18 | 1016 | Двигатель гл. привода вкл. |
| SpM2 | На приводе подач | t | S19 | 1017 | Подача включена |
| S10 | В зоне зажима детали на станке | k | S11 | 1018 | Деталь в зоне станка |
| SpM3 | На приводе поперечных подач | u | S21 | 1019 | Вкл. поперечная подача |
| SpM4.1 | На приводе продольных подач | v | S22 | 1020 | Вкл. продольная подача |
| SpM4.2 | На приводе продольных подач | v | S22 | 1020 | _ |
| SpM5 | На приводе транспортера | w | S23 | 1021 | Транспортер включен |
| SpM6 | На механизме подъема робота | x | S24 | 1022 | Робот подн. / /опускается |
| SpM7 | На механизме поворота робота | y | S25 | 1023 | Робот поворачивается |
| SpM8 | На механизме передвижения пиноли | z | S26 | 1024 | Пиноль отвод./ подводится |
| SтM1 | В ЧПУ | q | S20 | 1025 | ЧПУ включена |
| SтM2 | В ЧПУ | f | S6 | 1026 | ЧПУ отключена |
| М1 | Главный привод | A | Y1 | 1027 | |
| М2 | Привод подач | B | Y2 | 1028 | |
| М3 | Привод поперечных подач | C | Y3 | 1029 | |
| М4.1 | Привод продольных подач | D | Y4 | 1030 | |
| M4.2 | Привод продольных подач | E | Y5 | 1031 | |
| М5 | Привод транспортера | F | Y6 | 1032 | |
| М6 | Привод подъема робота | G | Y7 | 1033 | |
| М7 | Привод поворота робота | H | Y8 | 1034 | |
| М8 | Привод пиноли | I | Y9 | 1035 | |
| М9 | Привод зажима | J | Y10 | 1036 | |
| М10 | Привод перемещения | K | Y11 | 1037 |
Способ ее построения опишем на примере:
Рисунок 1 – Участок сети Петри.
На рисунке показан участок сети Петри а именно захват роботом детали.
Вершины графа в виде черточек и обозначенных "t" с последующим номером, называются переходами. Рi – позиция, в обозначении которых указывается от какого и до какого состояния происходит последующий переход. На переходах указывают состояния датчиков, которые позволяют произвести переход. В данном примере переход из позиции Р3 в позицию Р4 переходит по появлению сигнала с датчика S6, после чего привод Y10 отключается, т.е. происходит зажим детали. После построения сети Петри проверяем нет ли в ней "тупиковых" ситуаций. Сеть составлена так, что переход из одного состояния в другое имеет однозначные условия перехода, поэтому "тупиковых" ситуаций нет. В данной сети Петри в каждой ее позиции в любой момент времени может находиться не более одной точки. Следовательно сеть Петри является правильной.
4.1 Построение дерева иерархии
Построение дерева иерархии производим по следующему алгоритму: на верхнем уровне этого дерева находится автоматизированный комплекс, который обозначается Р0. На более низком уровне находятся устройства, составляющие АК, которые оберегаются Р1 … Р4. Ниже показывают операции, которые эти устройства производят и обозначают Р5 … Р12.
В схеме дерева иерархии приняты следующие обозначения:
Р0 – автоматизированный комплекс,
Р1 – станок,
Р2 – робот,
Р3 – транспортер,
Р4 – бункер,
Р5 – загрузка – выгрузка станка станочными механизмами,
Р6 – обработка детали,
Р7 – загрузка станка роботом,
Р8 – выгрузка станка роботом,
Р9 – подача детали к роботу,
Р10 – отвод детали,
Р11 – загрузка станка станочными механизмами,
Р12 – выгрузка станка станочными механизмами,
4.2 Построение сложной сети Петри и расчет дублеров
Из операций, описанных выше можно построить сложную сеть Петри в виде последовательно соединенных дублеров. Сложная сеть Петри состоит из дублеров di, номер которого соответствует позиции Pi дерева иерархии. Дублеры обозначаются двойным кружком. Сложная сеть Петри соответствует следующему алгоритму:
По кнопке "Пуск" (переход t0) происходит загрузка станка роботом (дублер d7); затем происходит загрузка станка станочными механизмами (дублер d11); После этого по переходу t2 происходит обработка детали (дублер d6); далее происходит выгрузка детали станочными механизмами (дублер d12); потом происходит выгрузка станка роботом (дублер d8); после чего происходит отвод детали (дублер d10); и далее цикл повторяется.
5. Построение расчетно-контактной схемы
По описанию алгоритма запишем формулы для механизмов РК.
На основе формул строим РКС. Умножение записываем в виде последовательной цепи, а сложение в виде параллельного соединения. Нормально разомкнутые контакты показаны на рисунке 2.1, что соответствует прямому сигналу, нормально замкнутые контакты показаны на рисунке 2.2, что соответствует инверсному состоянию датчиков. Механизм обозначаем релейным объектом 2.3.
Рисунок 2 – Условные обозначения в РКС
6. Построение циклограммы
На основе сети Петри, а также алгоритма работы комплекса составляем циклограмму, которая представляет собой графическое изображение последовательности работы отдельных механизмов схемы во времени.
Работа элемента и наличие соответствующего этому элементу сигнала изображается на циклограмме отрезком горизонтальной прямой. Толстой линией обозначаются сигналы командных и исполнительных элементов. Слева от отрезка, на границе циклограммы проставляются его обозначения. Большими буквами латинского алфавита обозначаются исполнительные механизмы. Маленькими буквами латинского алфавита – сигналы датчика.
Последовательность работы элементов определяется положением концов отрезков, изображающих их работу, относительно левой границы циклограммы.
Воздействие одного элемента на другой изображается на циклограмме стрелкой указывающей направление воздействия.
Возможны четыре случая:
Рисунок 3 – Варианты воздействия датчиков на исполнительные элементы. (3.1 – Случай, когда появление сигнала датчика а приводит к появлению сигнала с исполнительного устройства В
3.2 – Исчезновение сигнала с датчика а приводит к прекращению работы с исполнительного органа В;
3.3 – Исчезновение сигнала с датчика а приводит к началу работы исполнительного органа В;
3.4 – Появление сигнала с датчика а приводит к прекращению работы исполнительного органа В).
Все временное пространство работы комплекса разбивается на такты. Под тактом подразумевается период, в течении которых в схеме не изменяется состояние ни одного из сигналов. На основе вышесказанного строится циклограмма, которая приведена на листе 2 приложения А.
7. Проверка составления РКС
7.1 Проверка по циклограмме
Данная проверка включает в себя еще три проверки. При первой анализируются, существуют ли записанные ранее условия срабатывания в течении всего включающего периода.
Проверку проведем по функции, составленной для главного привода.
В течении всего цикла работы комплекса условие включения не изменилось, т.е. данная формула удовлетворяет первой проверке.
При второй проверке анализируется, существуют ли записанные ранее условия несрабатывания в течении всего включающего периода. Для функции главного привода таких ситуаций, когда условие несрабатывания бы не выполнялось, нет. Следовательно, данная функция удовлетворяет и второму условию.
Третья проверка заключается в том, чтобы после отключения исполнительного элемента исключить возможность создания условий для его повторного (неправильного) включения. Т.к. функция главного привода представляет собой произведение всех сигналов и удовлетворяет двум предыдущим проверкам, т.е. никаких дополнительных элементов не вводится, то функция А однозначно определяет условия срабатывания и несрабатывания и исключает случай неправильного включения (т.е. функция А равна 1 только при одной комбинации датчиков), то функция А удовлетворяет и третьей проверке. Следовательно функция А составлена правильно.
7.2 Проверка по таблице состояний
Проверку проводим для привода перемещения робота К.
Таблица 2 – Состояния функции К.
| К | h | d | a | e | c |
| 0 | 1 | * | * | * | * |
| 0 | 1 | 1 | 0 | 1 | 0 |
| 1 | 0 | 0 | 1 | 0 | 0 |
| 1 | 0 | 0 | 1 | 1 | 0 |
| 1 | 0 | 0 | 1 | 0 | 1 |
| 1 | 0 | 0 | 1 | 1 | 1 |
| 0 | 0 | 0 | 0 | 1 | 0 |
| 0 | 0 | 0 | 0 | 0 | 1 |
| 0 | 0 | 0 | 0 | 1 | 1 |
| 1 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 1 | 0 | 0 |
| 1 | 0 | 1 | 0 | 0 | 0 |
| 1 | 0 | 1 | 1 | 0 | 0 |
| 0 | 0 | 1 | 1 | 1 | 1 |
| 0 | 0 | 1 | 1 | 1 | 0 |
| 0 | 0 | 1 | 1 | 0 | 1 |
| 0 | 0 | 1 | 0 | 1 | 0 |
| 0 | 0 | 1 | 0 | 0 | 1 |
| 0 | 0 | 1 | 0 | 1 | 1 |

Производим упрощение по законам алгебры логики.

формула записана правильно.
8. Составление бесконтактно логической схемы
На основании функции, составленных ранее строим бесконтактную логическую схему.
При разработке приняты следующие обозначения:

Рисунок 4 – Условные графические обозначения элементов в бесконтактной логической схеме.
На рисунке 4.1 представлен логический элемент "И" (умножение).
На рисунке 4.2 представлен логический элемент "ИЛИ" (сложение).
На рисунке 4.3 представлен логический элемент "НЕ" (инверсия или отрицание).
Построение логической схемы представим на примере – составим бесконтактную логическую схему для управления приводом перемещения роботом К.
Ранее была проведена проверка формулы составленной для привода К.

Рисунок 5 - Бесконтактная логическая схема для элемента К.
9. Составление управляющей программы
Перед написанием программы проведем детализацию дублеров и напишем соответствие позиций сети Петри адресом ОЗУ контроллера NS-915. Представим данную операцию в виде таблицы:
Таблица 3 – Описание и адресация позиций сети Петри.
| № п/п | Обозн. | Функциональное описание | Адрес |
| d0 | Начальное состояние | ||
| 1 | P0 | Начальное состояние | 2000 |
| d7 | Загрузка станка роботом | ||
| 2 | P1 | Подвод транспортером детали | 2001 |
| 3 | P2 | Опускание робота | 2002 |
| 4 | P3 | Схват детали | 2003 |
| 5 | P4 | Подъем робота | 2004 |
| 6 | P5 | Перемещение робота | 2005 |
| 7 | P6 | Опускание робота | 2004 |
| 8 | P7 | Поворот робота и зажим детали на станке | 2006 |
| d11 | Загрузка станка станочным материалом | ||
| 9 | P8 | Отпускание детали | 2003 |
| 10 | P9 | Подъем робота | 2004 |
| d6 | Обработка детали | ||
| 11 | P10 | Включение подач | 2007 |
| 12 | P11 | Включение главного привода | 2008 |
| d12 | Разгрузка станка станочными механизмами | ||
| 13 | P12 | Опускание робота | 2004 |
| 14 | P13 | Схват детали | 2003 |
| 15 | P14 | Отвод пиноли | 2006 |
| d8 | Разгрузка станка роботом | ||
| 16 | P15 | Подъем робота | 2004 |
| 17 | P16 | Поворот робота и передвижение | 2009 |
| d10 | Отвод робота | ||
| 18 | P17 | Опускание робота | 2004 |
| 19 | P18 | Отпускание детали | 2003 |
| 20 | P19 | Подъем робота | 2004 |
| 21 | P20 | Передвижение робота | 2010 |
На основе таблицы запишем управляющую программу:
| 0000 | LD | 1007 | Описание начального состояния |
| 0001 | *C | 1012 | |
| 0002 | *C | 1021 | |
| 0003 | *C | 1011 | |
| 0004 | *C | 1014 | |
| 0005 | *C | 1025 | |
| 0006 | *C | 1026 | |
| 0007 | WR | 2000 | |
| 0008 | BR | 1130 | |
| 0009 | JM | 0000 | |
| 0010 | LD | 1025 | Задание функции А |
| 0011 | *C | 1026 | |
| 0012 | *C | 1009 | |
| 0013 | *C | 1010 | |
| 0014 | *C | 1013 | |
| 0015 | WR | 2008 | |
| 0016 | BR | 0010 | |
| 0017 | JM | 0018 | |
| 0018 | LD | 1025 | Задание функции В |
| 0019 | *C | 1026 | |
| 0020 | *C | 1009 | |
| 0021 | *C | 1010 | |
| 0022 | *C | 1013 | |
| 0023 | *C | 1016 | |
| 0024 | WR | 1007 | |
| 0025 | BR | 0018 | |
| 0026 | JM | 0027 | |
| 0027 | LD | 1025 | |
| 0028 | *C | 1026 | Описание функции С |
| 0029 | *C | 1009 | |
| 0030 | *C | 1010 | |
| 0031 | *C | 1016 | |
| 0032 | *C | 1013 | |
| 0033 | *C | 1017 | |
| 0034 | WR | 2007 | |
| 0035 | BR | 0027 | |
| 0036 | JM | 0037 | |
| 0037 | LD | 1025 | Описание функции D |
| 0038 | *C | 1026 | |
| 0039 | *C | 1009 | |
| 0040 | *C | 1010 | |
| 0041 | *C | 1016 | |
| 0042 | *C | 1013 | |
| 0043 | *C | 1003 | |
| 0044 | *C | 1021 | |
| 0045 | WR | 1007 | |
| 0046 | BR | 0037 | |
| 0047 | JM | 0048 | |
| 0048 | LD | 1025 | Описание функции Е |
| 0049 | *C | 1026 | |
| 0050 | *C | 1009 | |
| 0051 | *C | 1010 | |
| 0052 | *C | 1016 | |
| 0053 | *C | 1013 | |
| 0054 | *C | 1019 | |
| 0055 | *C | 1018 | |
| 0056 | WR | 2007 | |
| 0057 | BR | 0048 | |
| 0058 | JM | 0059 | |
| 0059 | LD | 1012 | Описание функции F |
| 0060 | *C | 1011 | |
| 0061 | *C | 1006 | |
| 0062 | *C | 1007 | |
| 0063 | WR | 2001 | |
| 0064 | BR | 0059 | |
| 0065 | JM | 0066 | |
| 0066 | LD | 1004 | Описание функции G |
| 0067 | *C | 1013 | |
| 0068 | *C | 1014 | |
| 0069 | *C | 1018 | |
| 0069 | LD | 1006 | |
| 0070 | *C | 1014 | |
| 0071 | *C | 1018 | |
| 0072 | *C | 1004 | |
| 0072 | + | ||
| 0073 | LD | 1003 | |
| 0074 | *C | 1002 | |
| 0075 | *C | 1006 | |
| 0076 | + | ||
| 0077 | LD | 1007 | |
| 0078 | *C | 1012 | |
| 0079 | + | ||
| 0080 | LD | 1007 | |
| 0081 | *C | 1008 | |
| 0082 | *C | 1006 | |
| 0083 | *C | 1013 | |
| 0084 | + | ||
| 0085 | WR | 2004 | |
| 0086 | BR | 0066 | |
| 0087 | JM | 0088 | |
| 0088 | LD | 1004 | |
| 0089 | *C | 1006 | |
| 0090 | *C | 1013 | |
| 0091 | WR | 1006 | |
| 0092 | BR | 0088 | |
| 0093 | JM | 0094 | |
| 0094 | LD | 1018 | Описание функции I |
| 0095 | *C | 1014 | |
| 0096 | *C | 1009 | |
| 0097 | *C | 1010 | |
| 0098 | *C | 1026 | |
| 0099 | LD | 1026 | |
| 0100 | *C | 1006 | |
| 0101 | *C | 1014 | |
| 0102 | + | ||
| 0103 | WR | 2006 | |
| 0104 | BR | 0094 | |
| 0105 | JM | 0106 | |
| 0106 | LD | 1006 | Описание функции J |
| 0107 | *C | 1018 | |
| 0108 | LD | 1006 | |
| 0109 | *C | 1008 | |
| 0110 | + | ||
| 0111 | LD | 1006 | |
| 0112 | *C | 1002 | |
| 0113 | + | ||
| 0114 | WR | 2003 | |
| 0115 | BR | 0106 | |
| 0116 | JM | 0117 | |
| 0117 | LD | 1007 | Описание функции К |
| 0118 | *C | 1004 | |
| 0119 | *C | 1001 | |
| 0120 | LD | 1007 | |
| 0121 | *C | 1005 | |
| 0122 | *C | 1003 | |
| 0123 | + | ||
| 0124 | WR | 2005 | |
| 0125 | BR | 0117 | |
| 0126 | JM | 0127 | |
| 0127 | LD | 2000 | Начальное состояние и переход на состояние 1 |
| 0128 | BR | 0130 | |
| 0129 | JM | 0000 | |
| 0130 | LD | 2001 | |
| 0131 | BR | 0130 | Переход из состояния 1 в состояние 2 |
| 0132 | LD | 2002 | |
| 0133 | BR | 0132 | Переход из состояния 2 в состояние 3 |
| 0134 | LD | 2003 | |
| 0135 | BR | 0134 | Переход из состояния 3 в состояние 4 |
| 0136 | LD | 2004 | |
| 0137 | BR | 0136 | Переход из состояния 4 в состояние 5 |
| 0138 | LD | 2005 | |
| 0139 | BR | 0138 | Переход из состояния 5 в состояние 6 |
| 0140 | LD | 2004 | |
| 0141 | WR | 1033 | Переход из состояния 6 в состояние 7 |
| 0142 | BR | 0140 | |
| 0143 | LD | 2006 | |
| 0144 | WR | 1035 | Переход из состояния 7 в состояние 8 |
| 0145 | BR | 0143 | |
| 0146 | LD | 2003 | |
| 0147 | WR | 1036 | Переход из состояния 8 в состояние 9 |
| 0148 | BR | 0146 | |
| 0149 | LD | 2004 | |
| 0150 | WR | 1033 | Переход из состояния 9 в состояние 10 |
| 0151 | BR | 0149 | |
| 0152 | LD | 2007 | |
| 0153 | WR | 1027 | Переход из состояния 10 в состояние 11 |
| 0154 | BR | 0152 | |
| 0155 | LD | 2008 | |
| 0156 | WR | 1028 | Переход из состояния 11 в состояние 12 |
| 0157 | WR | 1029 | |
| 0158 | WR | 1030 | |
| 0159 | WR | 1031 | |
| 0160 | BR | 0155 | |
| 0161 | LD | 2004 | Переход из состояния 12 в состояние 13 |
| 0162 | WR | 1033 | |
| 0163 | BR | 0161 | |
| 0164 | LD | 2003 | |
| 0165 | WR | 1036 | Переход из состояния 13 в состояние 14 |
| 0166 | BR | 0164 | |
| 0167 | LD | 2006 | |
| 0168 | WR | 1035 | Переход из состояния 14 в состояние 15 |
| 0169 | BR | 0167 | |
| 0170 | LD | 2004 | |
| 0171 | WR | 1033 | Переход из состояния 15 в состояние 16 |
| 0172 | BR | 0170 | |
| 0173 | LD | 2009 | |
| 0174 | WR | 1037 | Переход из состояния 16 в состояние 17 |
| 0175 | BR | 0173 | |
| 0176 | LD | 2004 | |
| 0177 | WR | 1037 | Переход из состояния 17 в состояние 18 |
| 0178 | BR | 0176 | |
| 0179 | LD | 2003 | |
| 0180 | WR | 1036 | Переход из состояния 18 в состояние 19 |
| 0181 | BR | 0179 | |
| 0182 | LD | 2004 | |
| 0183 | WR | 1033 | Переход из состояния 19 в состояние 20 |
| 0184 | BR | 0182 | |
| 0185 | LD | 2010 | |
| 0186 | WR | 1037 | Переход из состояния 20 в состояние 30 |
| 0187 | BR | 0185 | |
| 0188 | JM | 0127 | Повторение цикла |
Список литературы
1. "Системы управления автоматических машин" Рабинович А. Н. "Техника", 1973, 440 с.
2. "Логическое управление дискретными процессами" Юцицкий С. А. М.: "Машиностроение", 1987, 176 с.
3. "Металлорежущие станки" учебник для машиностроительных вузов" Пуша В. Э., М.: "Машиностроение", 1985, 256 с.
4. "Синтез микропрограммных автоматов" Баранов С. И., Л.: "Энергия", 1979, 232 с.
5. "Математическое обеспечение процессорных устройств ЧПУ" Сосонкин В. Л., М.: "НИИМАШ", 1981, 80 с.
6. "Автоматизированные технологические комплексы", М.: "НИИМАШ", 1981, 103 с.
7. "Автоматические станочные системы", М.: "Машиностроение", 1982, 319 с.