Реферат на тему Об одном способе векторного и аналитического представления контура изображения
Работа добавлена на сайт bukvasha.net: 2015-06-29Поможем написать учебную работу
Если у вас возникли сложности с курсовой, контрольной, дипломной, рефератом, отчетом по практике, научно-исследовательской и любой другой работой - мы готовы помочь.

Предоплата всего

Подписываем
А.Н. Каркищенко, А.Е. Лепский, А.В. Безуглов 1.ВведениеПредварительная обработка оцифрованного изображения объекта включает выделение, сглаживание и векторизацию контура. Под векторизацией будем понимать процесс сопоставления контуру последовательности конечномерных векторов, характеризующих изображение объекта. Все способы векторизации можно разделить на векторизацию по контрольным точкам и пошаговую векторизацию. К последним относится широкий класс методов, использующих так называемое преобразование Хау (см. [1], [2]). В качестве контрольных точек могут быть угловые точки [3], точки экстремума функции кривизны [4], точки перегиба и др. В статье рассмотрен простой алгоритм выделения контрольных точек и построения инвариантного векторного представления изображения объекта. Кроме того, предложен способ функционализации векторного представления изображения. Результатом функционализации является некоторая функция изображения, по которой частично или полностью может быть восстановлено векторное представление. В ряде задач, например, при распознавании симметрий, анализ функции изображения позволяет получить дополнительную информацию об изображении. Обсуждаются вопросы устойчивости функции изображения к изменению центра масс векторного представления, к появлению новой контрольной точки и т.д. 2. Алгоритм прослеживания контура и выявления контрольных точекРассмотрим дискретное бинарное изображение Просматриваем элементы матрицы
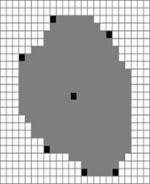
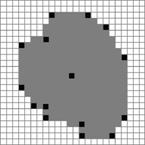
Рассмотрим Вычисляем вес Если Продолжаем обход контура. Пусть Если Пусть Данный алгоритм был реализован и апробирован в системе Borland Delphi. На рис. 1 и 2 представлены результаты векторизации бинарного изображения. Результаты работы программы сведены в таблицу 1. Очевидно, что в контрольных точках граница изображения претерпевает наиболее существенные изломы. Поэтому многоугольник где Рис. 1 Рис. 2 Табл. 1
На рис. 3 приведены графики изменения числа контрольных точек и их прироста в зависимости от выбранного порога h. Рис. 3. Прирост точек количественно равен уменьшению числа контрольных точек при увеличениях весового порога. Оптимальное пороговое значение следует выбирать из интервала от (h?, h??), где h? - значение весового порога, соответствующее максимуму прироста числа контрольных точек, h- значение, начиная с которого число контрольных точек равно нулю. Следует отметить, что в литературе имеется указание на то, что оптимальным для распознавания изображений считается получение приблизительно 40 контрольных точек [4]. 3. Формирование векторного представления контураПосле выполнения алгоритма прослеживания контура и выявления контрольных точек имеется три вектора: центр масс контрольных точек длины радиус-векторов контрольных точек относительно центра масс: косинусы углов между соседними радиус-векторами контрольных точек: Из вычисленных компонент составляем векторы Теорема 1. Если к нормированному векторному представлению Другими словами, если число контрольных точек достаточно велико, а вес новой точки небольшой, то центр симметрии сместится незначительно. 4.Функция изображенияВместо анализа векторного представления Теорема 2. Пусть Однако при добавлении новой контрольной точки даже с небольшим весом функция изображения, вообще говоря, может сильно измениться, так как она не является инвариантной относительно сдвига векторов векторного представления 5.Распознавание симметрийИзображение Теорема 3. Это мультипликативное свойство функции изображения можно использовать для распознавания симметрий, а именно, если для заданного малого Список литературы Hecker Y.C., Bolle R.M. On geometric hashing and the generalized Hough transform, IEEE Trans. Syst., Man and Cybern. 24, N9, 1994, p.1328-1338. Dufresne T.E., Dhawan A.P., Chord-tangent transformation for object recognition, Pattern Recogn. 28, N9, 1995, p.1321-1332. Bolles R., Cain R.A., Recognizing and locating partiavisible objects: The local-feature-focus method, Robot Vision A.Publ. Ed., 1984. Liu H.C., Srinath M.D., Partial Shape Classification Using Contour Matching in Distance Transformer; IEEE Trans. Pattern Anal. and Mach. Intell, 12, N11, p.1072-1079. Zahn C.T., Roskies R.S., Fourier descriptors for plane closed curves, IEEE Trans. Comput. C-21, March, 1972, p.269-281. Pei S.C., Liov L.G., Automatic symmetry determination and normalization for rotationally symmetric 2D shapes and 3D solid objects, Pattern Recogn, 27, N9, 1994, p.1193-1208. последовательностей".- Таганрог, изд. ТРТУ, 1996 г. |
 .
. ,
,
 , где
, где  .
. .
.