Контрольная работа на тему Микропроцессорная техника и аппаратура контроля в рабочих машинах 2
Работа добавлена на сайт bukvasha.net: 2014-11-06Поможем написать учебную работу
Если у вас возникли сложности с курсовой, контрольной, дипломной, рефератом, отчетом по практике, научно-исследовательской и любой другой работой - мы готовы помочь.

Предоплата всего
от 25%

Подписываем
договор
Министерство образования и науки Украины
Сумский Государственный Университет
Расчетно-графическая работа
по курсу:
”Микропроцессорная техника и аппаратура контроля
в рабочих машинах ”
Выполнил Приходько А.Н.
Группа ТМ-42
Вариант 57
Проверил Петровский М.В.
Сумы 2007
Задание.
Описать работу электрической схемы управления автоматическим пуском электродвигателя постоянного тока в соответствии с заданным вариантом. Привести пусковую диаграмму в виде механических характеристик.
Для получения схемы для своего варианта необходимо в исходной схеме (рисунок 1) заменить соответствующие элементы согласно варианту.
Таблица 1 - Исходные данные.


Рисунок 1- Исходная схема управления пуском электродвигателя.
Условные обозначения на схеме.

- Двигатель постоянного тока;
- обмотка возбуждения двигателя;
- нормально-замкнутый размыкающий контакт;
- контакт, размыкающийся с самовозвратом (кнопка «СТОП»);
- контакт, замыкающийся с самовозвратом (кнопка «ПУСК»);
- нормально-замкнутый контакт на замыкание с задержкой времени;
- нормально-замкнутый контакт на размыкание с задержкой времени;
- реле времени;
- электромагнитная обмотка реле;
- замыкающий контакт электромагнитного реле (ключ);
- сопротивление в силовой цепи двигателя.
- нормально-замкнутый размыкающий контакт

Рисунок 2- Схема управления пуском электродвигателя согласн варианту задания.
Для удобства описания работы в исходную схему были внесены некоторые изменения в индексы контакторов (КМ), реле времени (КТ) и комплекта, размыкающегося с задержкой времени при возврате (КТ).
Описание работы электрической схемы.
1. Когда схему подключают к источнику питания, под напряжением оказывается обмотка возбуждения двигателя (LM). Контакт КМ 1.3 замкнут, следовательно, реле времени КТ 1 находится под напряжением, а его контакт КТ 1.1 – замкнут.
2. При нажатии кнопки «ПУСК» (контакт SB2):
- срабатывает реле КМ 1, замыкаются контакты КМ 1.1, КМ 1.2, КМ 1.4, а контакт КМ1.3 – размыкается;
- на якорь двигателя поступает напряжение сети через резистор R2, срабатывает реле времени КТ3;
- контакт КМ 1.2 «блокирует» кнопку SB2, и двигатель не отключается после отпускания кнопки;
- контакт КМ 1.3 разрывает цепь реле КТ 1, и оно обесточивается, но контакт КТ 1.1 замкнут, так как срабатывает задержка на размыкание, работают реле КМ 2.1 и КМ 4.1, шундируются сопротивления R1 и R3;
- затем через время размыкается контакт КТ 1.1, перестаёт работать реле КМ 2.1;
- через время замыкается контакт КТ 2.1, срабатывает реле КМ 3.1, шундируется сопротивление R2;
- по истечении времени задержки выключается контакт КТ 3.1, перестаёт работать реле КМ 4.1.
3. При нажатии кнопки «СТОП» (контакт SB1) размыкается цепь реле КМ 1 и размыкается его контакт КМ 1.1, тем самым, разрывая цепь якоря, что приводит к остановке двигателя. Контакт КМ 1.3 замыкается и срабатывает реле времени КТ 1.

Рисунок 3 – Пусковая диаграмма.
Участок 0 – 1 – включение двигателя; частота вращения n = 0, момент М= Мпусковой.
Участок 1 – 2 – разгон двигателя. R= Rя + R2
Участок 3 – 4 – размыкается контакт КТ 1.1, перестаёт работать реле КМ 2.1.
Участок 5 – 6 – включается контакт КТ 2.1, включается реле КМ 3.1, шундируется сопротивление R2.
Участок 7-8 – выключается контакт КТ 3.1, перестаёт работать реле КМ 4.1. Ротор разгоняется до номинальной частоты. Вращение осуществляется при R = Rя + R1 + R3.
В точке 8 электродвигатель работает с частотой вращения n = nраб, и моментом М = Мраб.
Устройство и принцип действия емкостного датчика с переменной
площадью. Погрешность преобразования. Область применения.
Принцип действия емкостной измерительной системы основан – на том, что с измерением размера контролируемой детали изменяется емкость конденсатора датчика. Измеряя тем или иным путем эту емкость, можно судить о размере изделия.
Емкостный метод контроля может быть как контактным, так и бесконтактным. При бесконтактном методе одной из пластин конденсатора служит само контролируемое изделие; при контактном методе емкостный датчик представляет собой плоский или цилиндрический конденсатор, одна из пластин которого связана с измерительным стержнем. Бесконтактный метод находит ограниченное применение.
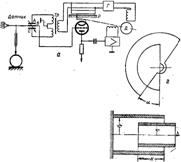
Рис. 4. Емкостные датчики: а- схема включения; б- датчик с поворотными пластинами; в- датчики с пластинами в виде выдвижных цилиндров.
Емкостные датчики работают только с преобразующими электросхемами. Применяются в основном два типа схем: преобразующая схема, работающая как прецизионный измеритель емкости по методу моста, в одно из плеч которого включен датчик, и схема с включением емкостного датчика в контур задающего генератора. В первом типе схем при изменении емкости датчика в диагонали моста возникает напряжение разбаланса, которое может быть использовано непосредственно для отсчета или как напряжение, приводящее в действие сервосистему, осушествляющую нулевой баланс моста. Во втором типе схем при изменении емкости меняется частота генератора. По величине изменения частоты можно судить о размере изделия. Эта схема значительно чувствительнее мостовой, но более подвержена всевозможным влияниям извне. Емкостные датчики имеют ряд преимуществ перед другими датчиками; линейное изменение параметра (емкости) в довольно широких пределах рабочего хода, обеспечивающее при этом очень высокую точность измерения (до долей микрона); измерительное усилие датчика может быть столь незначительным (несколько грамм), что датчик может конкурировать с бесконтактными методами измерения; при включении в соответствующую схему емкости датчика могут быть использованы для дифференциальных измерений.
На рис.4, а приведена типовая схема включения емкостного датчика. На неподвижные электроды датчика подается переменное напряжение с частотой 50 гц от трансформатора Тр с заземленной средней точкой. При смещении подвижного электрода В относительно нейтрального положения на сетке лампы появляется напряжение, которое после усиления подается к электродвигателю Д. При работе электродвигателя щетка реохорда Р перемещается до тех пор, пока напряжение на катоде лампы не станет равным напряжению на сетке. На одной оси с реохордом находится шкала, проградуированная в единицах измеряемой величины. На диске шкалы смонтирован упор. При предельных размерах детали он воздействует на концевые выключатели; при этом подается импульс на исполнительное реле. Такого рода емкостный датчик является дифференциальным, так как в нем имеется одна подвижная В и две неподвижные А и С пластины, что увеличивает чувствительность датчика.В емкостном датчике переменным электрическим параметром является емкость конденсатора [17]
 (1)
(1)
где ε – относительная диэлектрическая проницаемость среди между пластинами конденсатора; S – площадь пластин, см  ; δ – воздушный зазор между пластинами, см.
; δ – воздушный зазор между пластинами, см.
Зависимость (1) является нелинейной, однако при малых перемещениях х пластин по сравнению с начальным расстоянием между пластинами ее можно считать приближенно линейной. Действительно, при перемещении пластины конденсатора – на величину х его емкость

 (2)
(2)
Умножая и деля последнее равенство на (1 +  ) и пренебрегая в знаменателе величиной второго порядка малости
) и пренебрегая в знаменателе величиной второго порядка малости  получаем
получаем
 , (3)
, (3)
Емкостные датчики выполняются не только в виде расходящихся пластин (рис. 4, а), но и в виде поворотных пластин (рис. 4, б) или выдвииных цилиндров (рис. 4, в).
Емкость датчика с поворотной пластиной
 , (4)
, (4)
где α – угол поворота подвижной пластины,
 – площадь взаимодействия между пластинами
– площадь взаимодействия между пластинами
α = 0.
Емкость цилиндрического конденсатора
 , (5)
, (5)
где Н – глубина погружения внутреннего цилиндра во внешний;
r  – радиус внутреннего цилиндра;
– радиус внутреннего цилиндра;
r  – радиус внешнего цилиндра.
– радиус внешнего цилиндра.
Список использованной литературы
1.Стрыгин “Основы автоматики и вычислительной техники”. Учебное пособие для ВУЗов.1981г.
2.Арменский Е.В., Фалк Г.Б. “Электрические микромашины”, 1985г.
3.Сафонов Ю.М. “Электроприводы промышленных роботов”. М.-1990г.
Сумский Государственный Университет
Расчетно-графическая работа
по курсу:
”Микропроцессорная техника и аппаратура контроля
в рабочих машинах ”
Выполнил Приходько А.Н.
Группа ТМ-42
Вариант 57
Проверил Петровский М.В.
Сумы 2007
Задание.
Описать работу электрической схемы управления автоматическим пуском электродвигателя постоянного тока в соответствии с заданным вариантом. Привести пусковую диаграмму в виде механических характеристик.
Для получения схемы для своего варианта необходимо в исходной схеме (рисунок 1) заменить соответствующие элементы согласно варианту.
Таблица 1 - Исходные данные.
|
Рисунок 1- Исходная схема управления пуском электродвигателя.
Условные обозначения на схеме.
- Двигатель постоянного тока;
- обмотка возбуждения двигателя;
- нормально-замкнутый размыкающий контакт;
- контакт, размыкающийся с самовозвратом (кнопка «СТОП»);
- контакт, замыкающийся с самовозвратом (кнопка «ПУСК»);
- нормально-замкнутый контакт на замыкание с задержкой времени;
- нормально-замкнутый контакт на размыкание с задержкой времени;
- реле времени;
- электромагнитная обмотка реле;
- замыкающий контакт электромагнитного реле (ключ);
- сопротивление в силовой цепи двигателя.
- нормально-замкнутый размыкающий контакт
Рисунок 2- Схема управления пуском электродвигателя согласн варианту задания.
Для удобства описания работы в исходную схему были внесены некоторые изменения в индексы контакторов (КМ), реле времени (КТ) и комплекта, размыкающегося с задержкой времени при возврате (КТ).
Описание работы электрической схемы.
1. Когда схему подключают к источнику питания, под напряжением оказывается обмотка возбуждения двигателя (LM). Контакт КМ 1.3 замкнут, следовательно, реле времени КТ 1 находится под напряжением, а его контакт КТ 1.1 – замкнут.
2. При нажатии кнопки «ПУСК» (контакт SB2):
- срабатывает реле КМ 1, замыкаются контакты КМ 1.1, КМ 1.2, КМ 1.4, а контакт КМ1.3 – размыкается;
- на якорь двигателя поступает напряжение сети через резистор R2, срабатывает реле времени КТ3;
- контакт КМ 1.2 «блокирует» кнопку SB2, и двигатель не отключается после отпускания кнопки;
- контакт КМ 1.3 разрывает цепь реле КТ 1, и оно обесточивается, но контакт КТ 1.1 замкнут, так как срабатывает задержка на размыкание, работают реле КМ 2.1 и КМ 4.1, шундируются сопротивления R1 и R3;
- затем через время размыкается контакт КТ 1.1, перестаёт работать реле КМ 2.1;
- через время замыкается контакт КТ 2.1, срабатывает реле КМ 3.1, шундируется сопротивление R2;
- по истечении времени задержки выключается контакт КТ 3.1, перестаёт работать реле КМ 4.1.
3. При нажатии кнопки «СТОП» (контакт SB1) размыкается цепь реле КМ 1 и размыкается его контакт КМ 1.1, тем самым, разрывая цепь якоря, что приводит к остановке двигателя. Контакт КМ 1.3 замыкается и срабатывает реле времени КТ 1.
Рисунок 3 – Пусковая диаграмма.
Участок 0 – 1 – включение двигателя; частота вращения n = 0, момент М= Мпусковой.
Участок 1 – 2 – разгон двигателя. R= Rя + R2
Участок 3 – 4 – размыкается контакт КТ 1.1, перестаёт работать реле КМ 2.1.
Участок 5 – 6 – включается контакт КТ 2.1, включается реле КМ 3.1, шундируется сопротивление R2.
Участок 7-8 – выключается контакт КТ 3.1, перестаёт работать реле КМ 4.1. Ротор разгоняется до номинальной частоты. Вращение осуществляется при R = Rя + R1 + R3.
В точке 8 электродвигатель работает с частотой вращения n = nраб, и моментом М = Мраб.
Устройство и принцип действия емкостного датчика с переменной
площадью. Погрешность преобразования. Область применения.
Принцип действия емкостной измерительной системы основан – на том, что с измерением размера контролируемой детали изменяется емкость конденсатора датчика. Измеряя тем или иным путем эту емкость, можно судить о размере изделия.
Емкостный метод контроля может быть как контактным, так и бесконтактным. При бесконтактном методе одной из пластин конденсатора служит само контролируемое изделие; при контактном методе емкостный датчик представляет собой плоский или цилиндрический конденсатор, одна из пластин которого связана с измерительным стержнем. Бесконтактный метод находит ограниченное применение.
Рис. 4. Емкостные датчики: а- схема включения; б- датчик с поворотными пластинами; в- датчики с пластинами в виде выдвижных цилиндров.
Емкостные датчики работают только с преобразующими электросхемами. Применяются в основном два типа схем: преобразующая схема, работающая как прецизионный измеритель емкости по методу моста, в одно из плеч которого включен датчик, и схема с включением емкостного датчика в контур задающего генератора. В первом типе схем при изменении емкости датчика в диагонали моста возникает напряжение разбаланса, которое может быть использовано непосредственно для отсчета или как напряжение, приводящее в действие сервосистему, осушествляющую нулевой баланс моста. Во втором типе схем при изменении емкости меняется частота генератора. По величине изменения частоты можно судить о размере изделия. Эта схема значительно чувствительнее мостовой, но более подвержена всевозможным влияниям извне. Емкостные датчики имеют ряд преимуществ перед другими датчиками; линейное изменение параметра (емкости) в довольно широких пределах рабочего хода, обеспечивающее при этом очень высокую точность измерения (до долей микрона); измерительное усилие датчика может быть столь незначительным (несколько грамм), что датчик может конкурировать с бесконтактными методами измерения; при включении в соответствующую схему емкости датчика могут быть использованы для дифференциальных измерений.
На рис.4, а приведена типовая схема включения емкостного датчика. На неподвижные электроды датчика подается переменное напряжение с частотой 50 гц от трансформатора Тр с заземленной средней точкой. При смещении подвижного электрода В относительно нейтрального положения на сетке лампы появляется напряжение, которое после усиления подается к электродвигателю Д. При работе электродвигателя щетка реохорда Р перемещается до тех пор, пока напряжение на катоде лампы не станет равным напряжению на сетке. На одной оси с реохордом находится шкала, проградуированная в единицах измеряемой величины. На диске шкалы смонтирован упор. При предельных размерах детали он воздействует на концевые выключатели; при этом подается импульс на исполнительное реле. Такого рода емкостный датчик является дифференциальным, так как в нем имеется одна подвижная В и две неподвижные А и С пластины, что увеличивает чувствительность датчика.В емкостном датчике переменным электрическим параметром является емкость конденсатора [17]
где ε – относительная диэлектрическая проницаемость среди между пластинами конденсатора; S – площадь пластин, см
Зависимость (1) является нелинейной, однако при малых перемещениях х пластин по сравнению с начальным расстоянием между пластинами ее можно считать приближенно линейной. Действительно, при перемещении пластины конденсатора – на величину х его емкость
(2) Умножая и деля последнее равенство на (1 +
Емкостные датчики выполняются не только в виде расходящихся пластин (рис. 4, а), но и в виде поворотных пластин (рис. 4, б) или выдвииных цилиндров (рис. 4, в).
Емкость датчика с поворотной пластиной
где α – угол поворота подвижной пластины,
α = 0.
Емкость цилиндрического конденсатора
, (5) где Н – глубина погружения внутреннего цилиндра во внешний;
r
r
Список использованной литературы
1.Стрыгин “Основы автоматики и вычислительной техники”. Учебное пособие для ВУЗов.1981г.
2.Арменский Е.В., Фалк Г.Б. “Электрические микромашины”, 1985г.
3.Сафонов Ю.М. “Электроприводы промышленных роботов”. М.-1990г.